Essence

Fig.1. Overall structure of the survey.
이 논문은 Large Language Models(LLMs)과 multimodal foundation models를 로봇 학습에 적용하는 최신 기술을 체계적으로 조사하는 survey이며, manipulation, navigation, planning, reasoning의 네 가지 주요 영역에서 foundation model 기법의 적용 방식을 분석한다.
저자: Xuan Xiao, Jiahang Liu, Zhipeng Wang, Yanmin Zhou, Yong Qi, Qian Cheng, Bin He, Shuo Jiang | 날짜: 2023-11-24 | URL: https://arxiv.org/abs/2311.14379 📄 PDF
Fig.1. Overall structure of the survey.
이 논문은 Large Language Models(LLMs)과 multimodal foundation models를 로봇 학습에 적용하는 최신 기술을 체계적으로 조사하는 survey이며, manipulation, navigation, planning, reasoning의 네 가지 주요 영역에서 foundation model 기법의 적용 방식을 분석한다.
Fig.1. Overall structure of the survey.
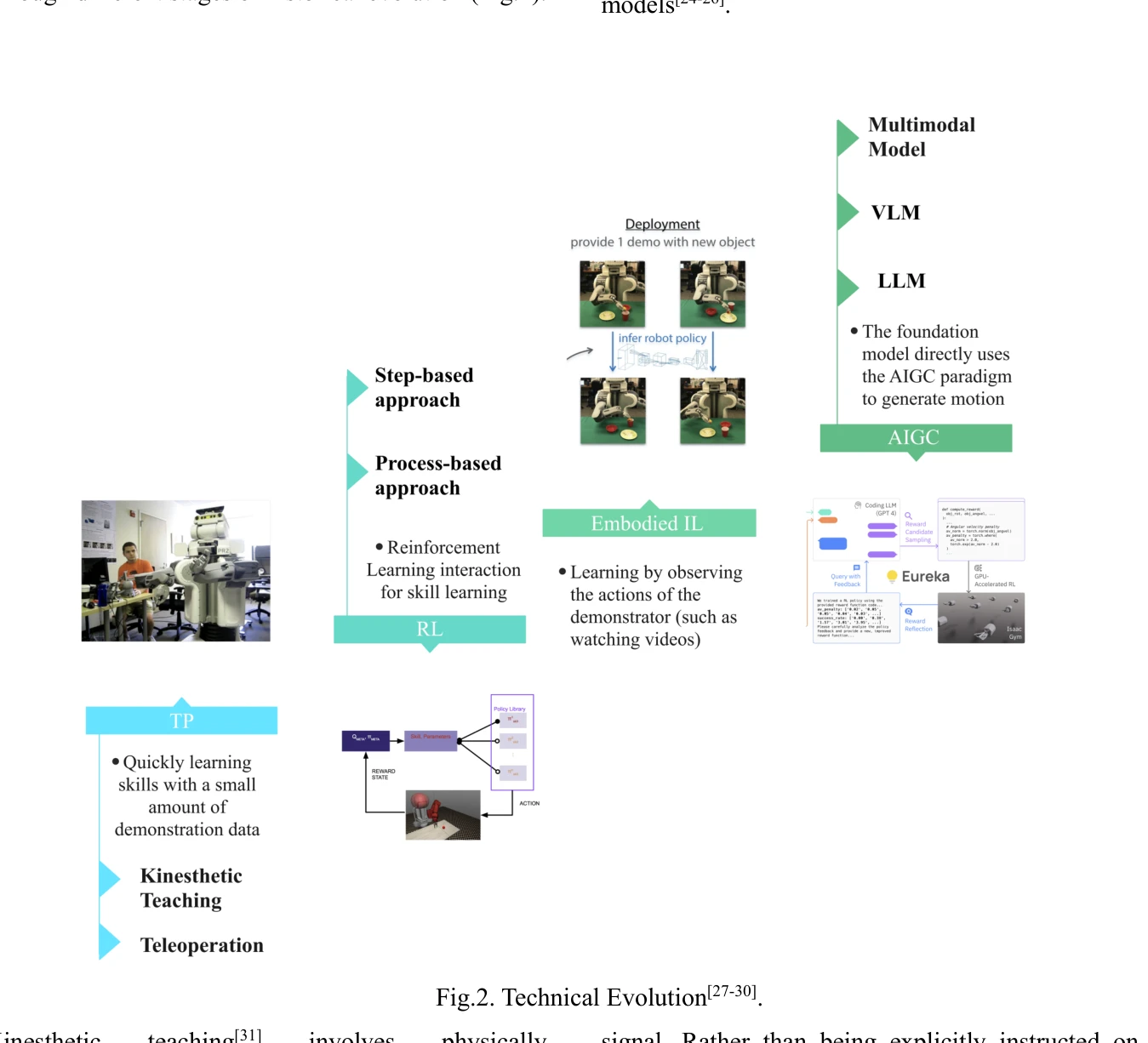
Fig.2. Technical Evolution[27-30].
총평: 이 논문은 LLMs와 multimodal foundation models의 로봇 학습 적용이라는 새로운 학제간 분야를 체계적으로 정리한 중요한 survey로서, 기술 진화 단계화, 네 가지 주요 작업 영역 분류, 그리고 미해결 실제 문제의 명시적 규명을 통해 향후 embodied AI 연구의 로드맵을 제시한다. 다만 구체적인 기술적 해법과 정량적 성능 비교가 부족하여 실제 구현 단계의 연구자들을 위한 가이드로서의 역할은 제한적이다.