Essence
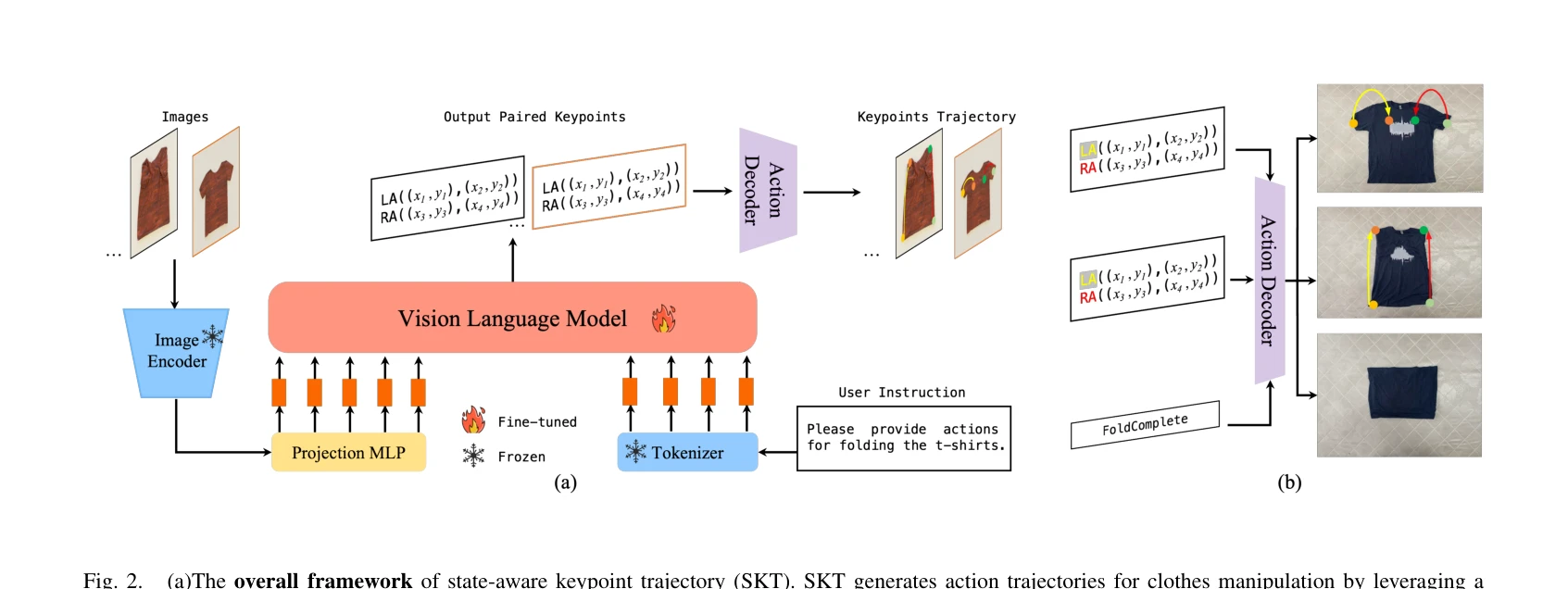
Fig. 2.
본 논문은 Vision-Language Model(VLM)을 활용한 State-aware Keypoint Trajectories(SKT)를 제안하여 다양한 의류 상태에서 로봇의 의류 조작 성능을 향상시킨다. 합성 데이터셋을 통해 단일 모델로 여러 의류 유형을 처리할 수 있는 통합 접근법을 구현한다.
저자: Xin Li, Siyuan Huang, Qiaojun Yu, Zhengkai Jiang, Ce Hao, Yimeng Zhu, Hongsheng Li, Peng Gao, Cewu Lu | 날짜: 2024-09-26 | URL: https://arxiv.org/abs/2409.18082 📄 PDF
Fig. 2.
본 논문은 Vision-Language Model(VLM)을 활용한 State-aware Keypoint Trajectories(SKT)를 제안하여 다양한 의류 상태에서 로봇의 의류 조작 성능을 향상시킨다. 합성 데이터셋을 통해 단일 모델로 여러 의류 유형을 처리할 수 있는 통합 접근법을 구현한다.
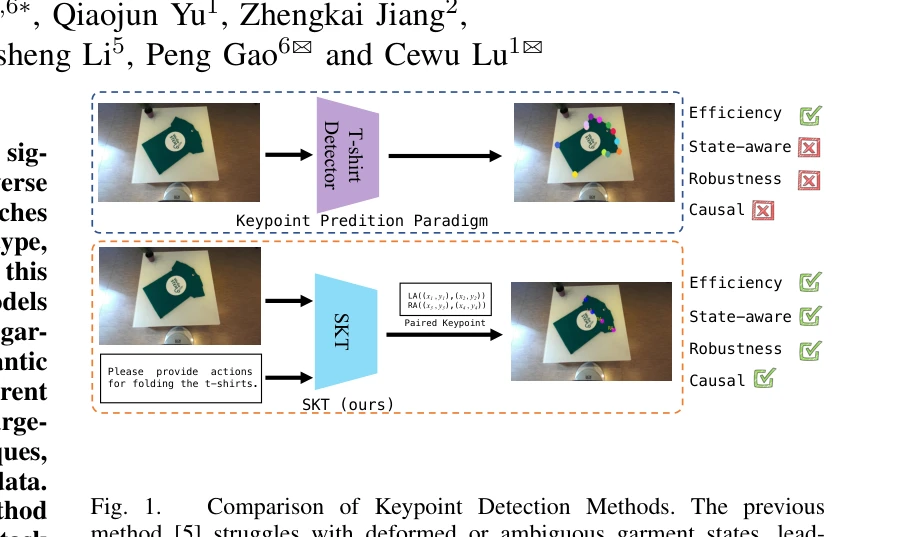
Fig. 1.
Fig. 2.
총평: 본 논문은 VLM을 의류 조작에 창의적으로 적용하여 단일 모델로 다양한 의류 상태를 처리하는 혁신적 접근법을 제시한다. 합성 데이터 활용과 reasoning 기반 설계로 확장성과 적응성을 크게 개선하여 assistive robotics 분야에 중요한 기여를 한다.