Essence
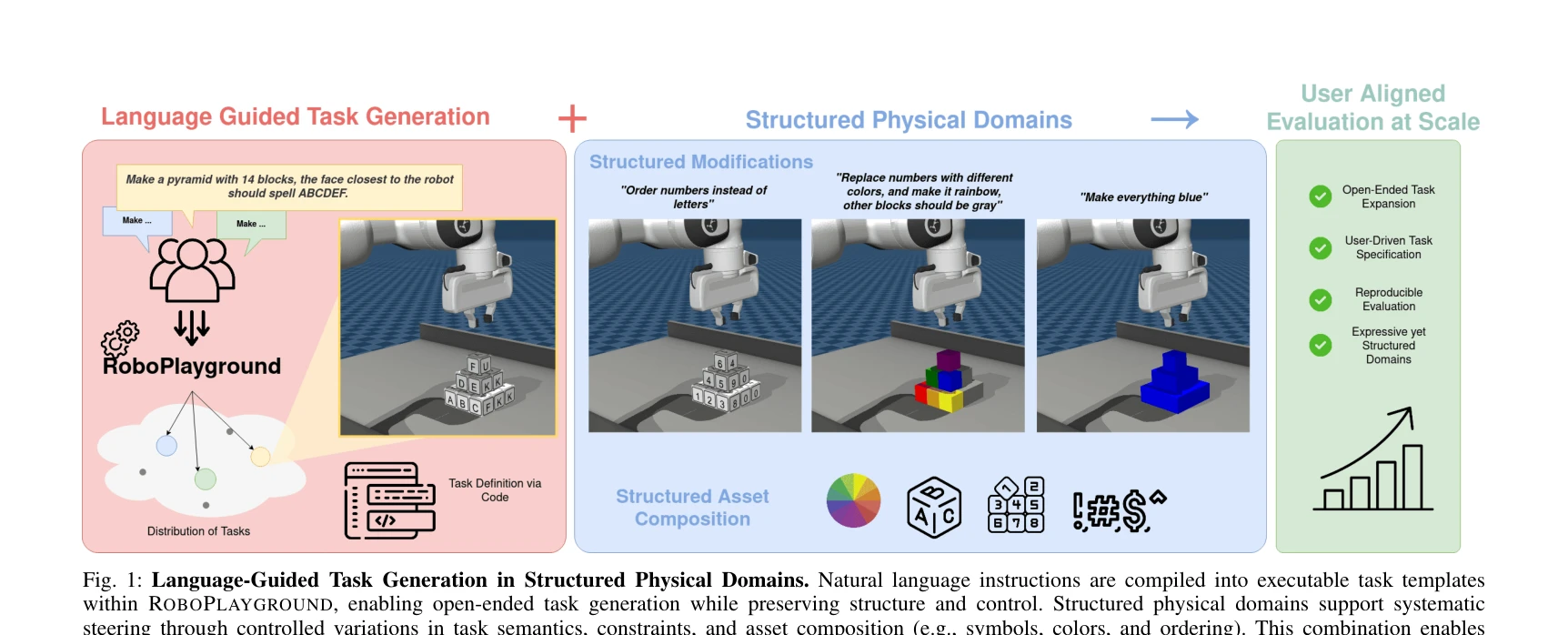
Fig. 1: Language-Guided Task Generation in Structured Physical Domains. Natural language instructions are compiled into
자연어로 로봇 조작 작업을 정의하고 재현 가능한 작업 명세로 컴파일하는 RoboPlayground 프레임워크를 제안하며, 고정 벤치마크에서 드러나지 않는 일반화 실패를 언어 기반 작업 변형을 통해 발견한다.
저자: | 날짜: 2026-04-06 | URL: https://arxiv.org/abs/2604.05226 📄 PDF
Fig. 1: Language-Guided Task Generation in Structured Physical Domains. Natural language instructions are compiled into
자연어로 로봇 조작 작업을 정의하고 재현 가능한 작업 명세로 컴파일하는 RoboPlayground 프레임워크를 제안하며, 고정 벤치마크에서 드러나지 않는 일반화 실패를 언어 기반 작업 변형을 통해 발견한다.

Fig. 4: Inter-user and intra-user diversity of natural-language manipulation tasks. (Left) A t-SNE projection of sentenc

Fig. 5: Overall Pipeline. Task descriptions flow through Task Orchestration, CodeGen, and Validation to produce Task Art
총평: RoboPlayground는 로봇 평가의 민주화와 접근성을 크게 향상시키는 혁신적 접근법으로, 언어 기반 구조화된 작업 변형을 통해 고정 벤치마크가 놓치는 정책의 실제 약점을 드러낸다는 점에서 중요한 기여다. 다만 도메인 제한과 대규모 crowd-sourced 평가의 품질 관리가 실무 적용의 과제다.