Essence

Figure 2: Conditional Autoregressive Motion Diffusion Model
Transformer 기반 Conditional Autoregressive Motion Diffusion Model (CAMDM)을 제안하여 사용자의 동적 제어 신호에 실시간으로 반응하면서 고품질의 다양한 캐릭터 애니메이션을 생성한다.
저자: Rui Chen, Mingyi Shi, Shaoli Huang, Ping Tan, Taku Komura, Xuelin Chen | 날짜: 2024-04-23 | URL: https://arxiv.org/abs/2404.15121 📄 PDF
Figure 2: Conditional Autoregressive Motion Diffusion Model
Transformer 기반 Conditional Autoregressive Motion Diffusion Model (CAMDM)을 제안하여 사용자의 동적 제어 신호에 실시간으로 반응하면서 고품질의 다양한 캐릭터 애니메이션을 생성한다.
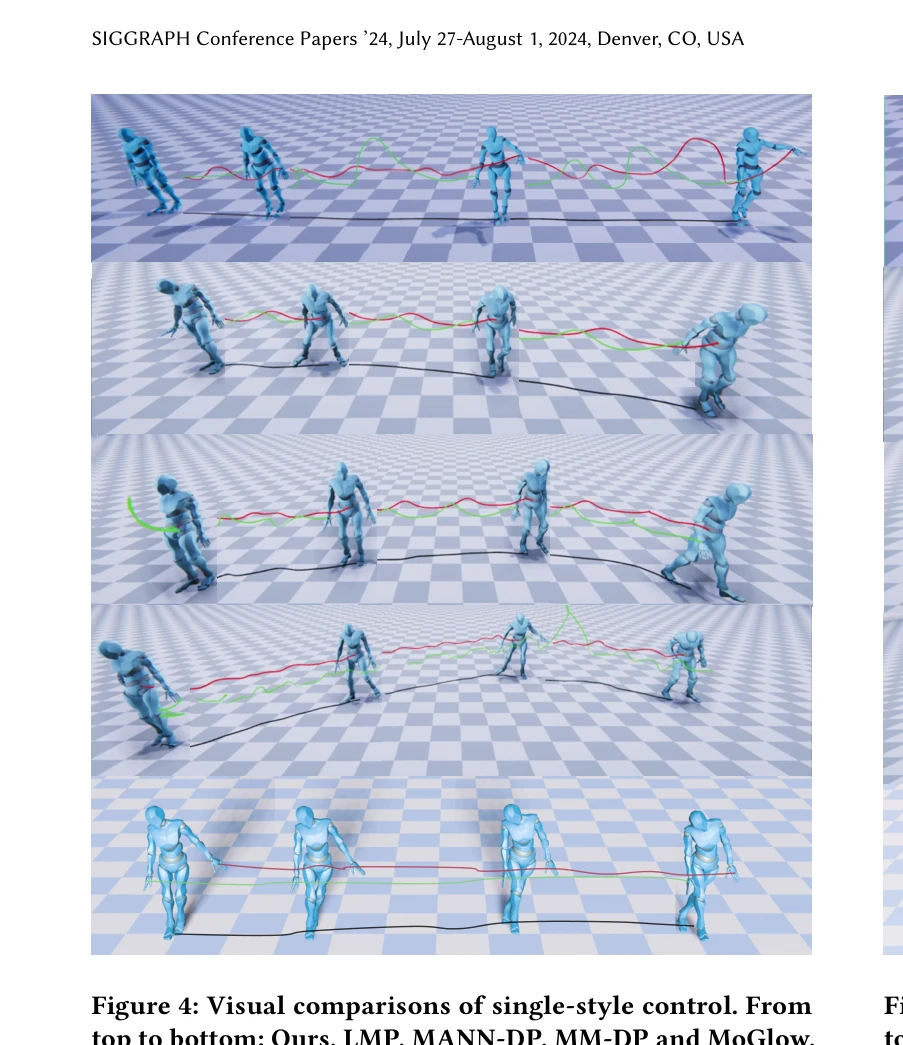
Figure 4: Visual comparisons of single-style control. From
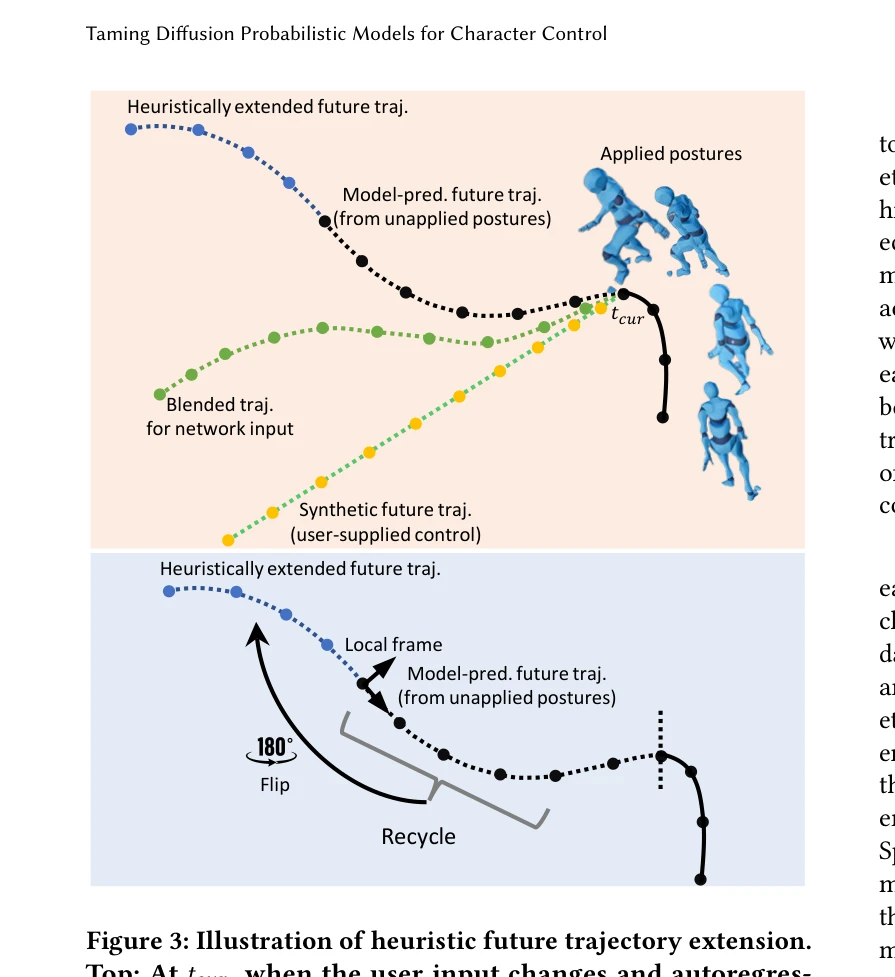
Figure 3: Illustration of heuristic future trajectory extension.
총평: Diffusion model을 실시간 캐릭터 컨트롤에 적용하기 위한 체계적이고 실용적인 해결책을 제시한 우수한 논문으로, 별도 조건 토큰화와 classifier-free guidance의 novel한 조합이 다양성과 제어 안정성을 동시에 달성하며, 단일 모델의 다중 스타일 지원은 산업 응용 가치가 높다.