Essence
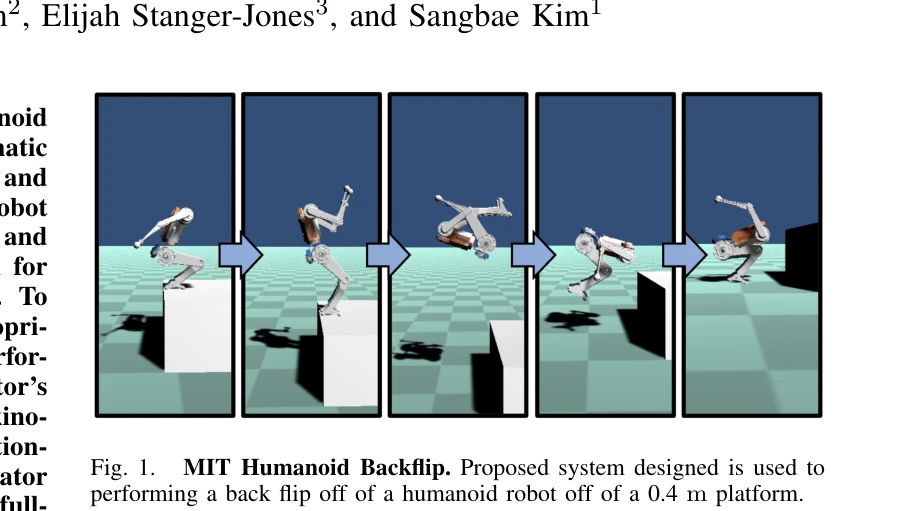
Fig. 1.
MIT 휴머노이드 로봇이 고도의 동역학 운동(백플립, 전플립, 회전 점프)을 수행하기 위해 맞춤형 액추에이터 설계, actuator-aware kino-dynamic 모션 플래닝, 그리고 MPC와 WBIC을 통합한 착지 제어 시스템을 제시한다.
저자: Matthew Chignoli, Donghyun Kim, Elijah Stanger-Jones, Sangbae Kim | 날짜: 2021-04-19 | URL: https://arxiv.org/abs/2104.09025 📄 PDF
Fig. 1.
MIT 휴머노이드 로봇이 고도의 동역학 운동(백플립, 전플립, 회전 점프)을 수행하기 위해 맞춤형 액추에이터 설계, actuator-aware kino-dynamic 모션 플래닝, 그리고 MPC와 WBIC을 통합한 착지 제어 시스템을 제시한다.
총평: 본 논문은 humanoid 로봇의 고도의 동역학 운동을 실현하기 위해 하드웨어, 모션 플래닝, 제어를 통합적으로 설계한 체계적인 접근법을 제시하며, 맞춤형 액추에이터 개발과 정밀한 검증을 통해 높은 신뢰성을 확보한 우수한 연구이다.