Essence
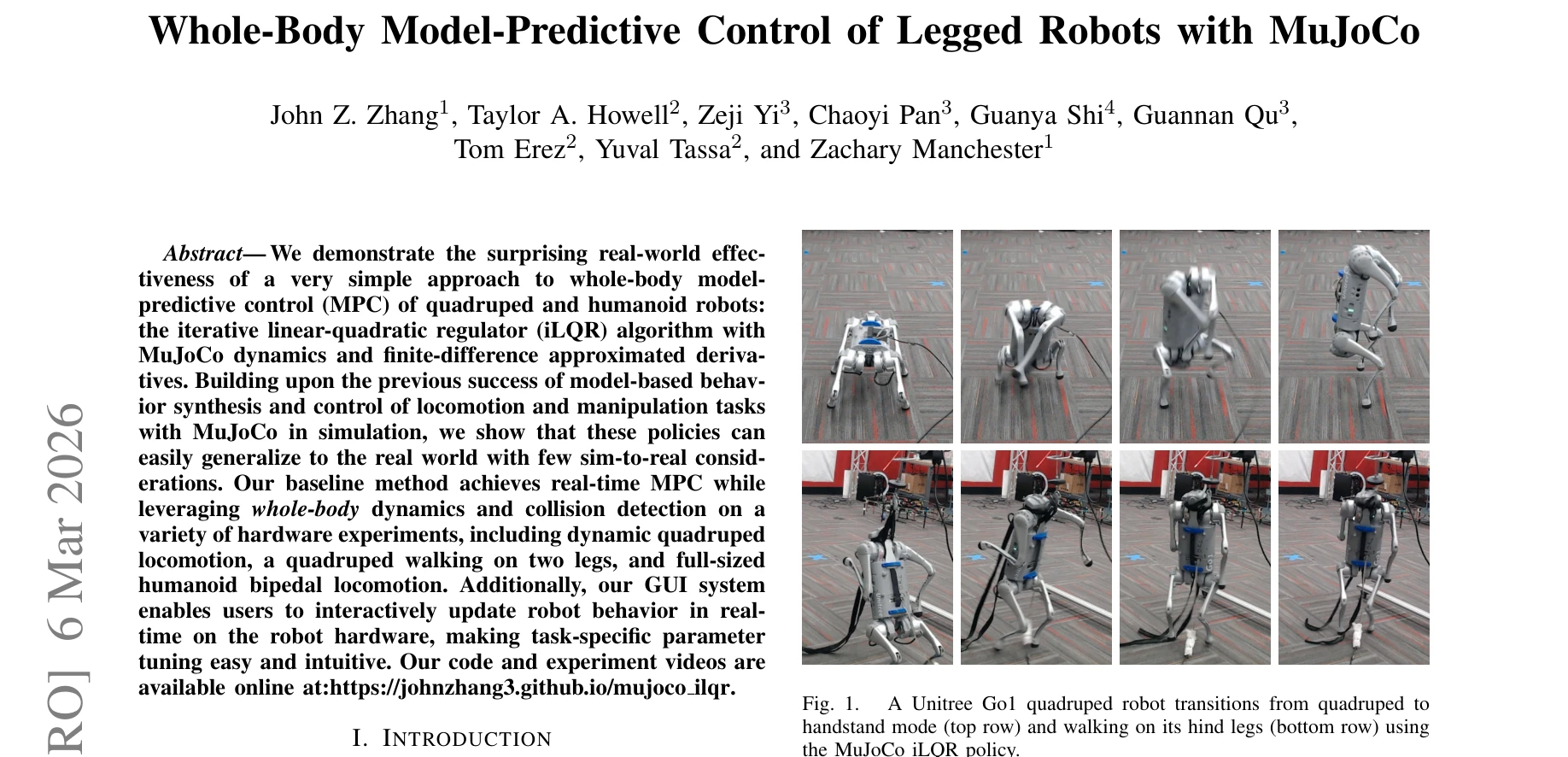
Fig. 1.
MuJoCo 물리엔진과 iterative LQR (iLQR) 알고리즘을 결합하여 사족 및 인형로봇의 전신 모델예측제어(MPC)를 실시간으로 수행하고, 간단한 방법으로도 현실 세계에 효과적으로 적용 가능함을 입증하는 연구이다.
저자: John Z. Zhang, Taylor A. Howell, Zeji Yi, Chaoyi Pan, Guanya Shi, Guannan Qu, Tom Erez, Yuval Tassa, Zachary Manchester | 날짜: 2025-03-06 | URL: https://arxiv.org/abs/2503.04613 📄 PDF
Fig. 1.
MuJoCo 물리엔진과 iterative LQR (iLQR) 알고리즘을 결합하여 사족 및 인형로봇의 전신 모델예측제어(MPC)를 실시간으로 수행하고, 간단한 방법으로도 현실 세계에 효과적으로 적용 가능함을 입증하는 연구이다.
Fig. 1.
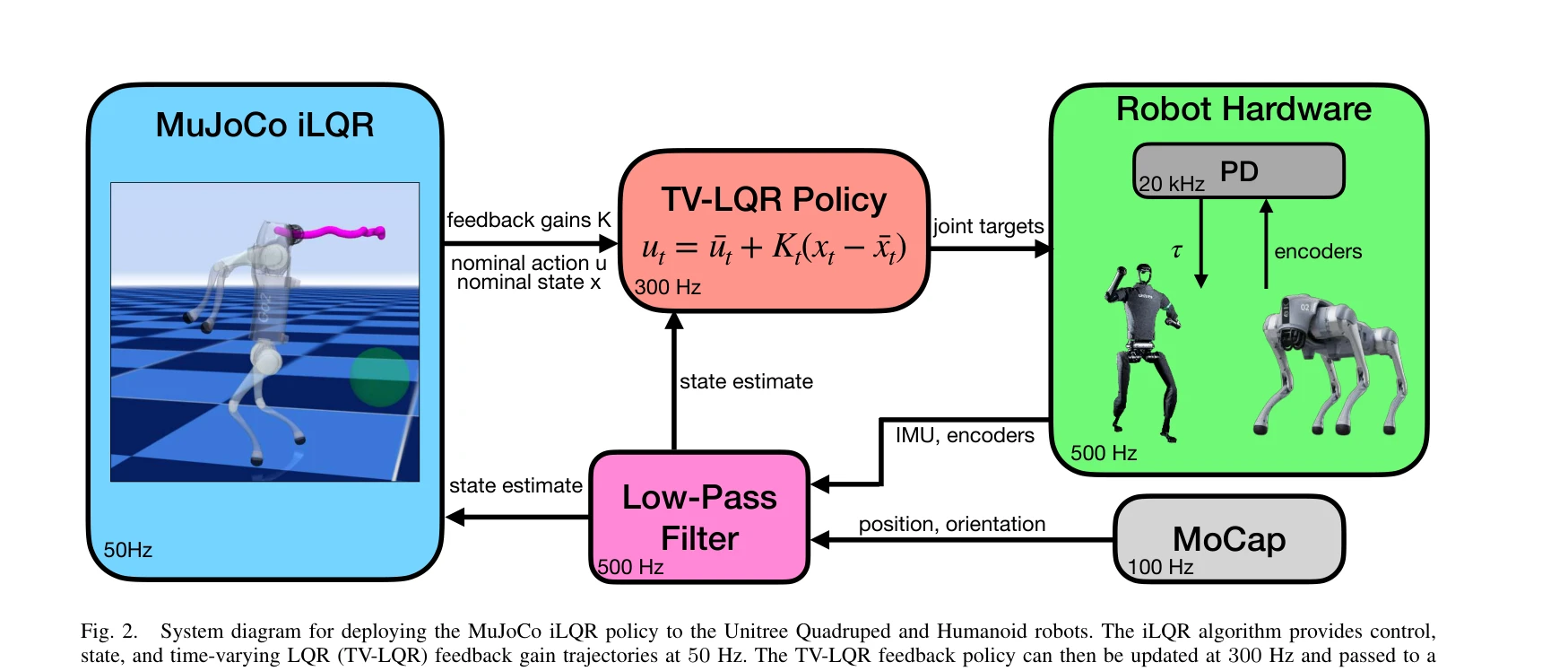
Fig. 2.
총평: 이 논문은 복잡한 최적화 이론 대신 표준 도구들의 조합으로 현실 세계 다리로봇 제어를 성공시킨 우수한 실증 연구이며, 공개된 코드와 상세한 구현 정보로 커뮤니티 연구 가속화에 큰 기여할 것으로 기대된다.