Achievement
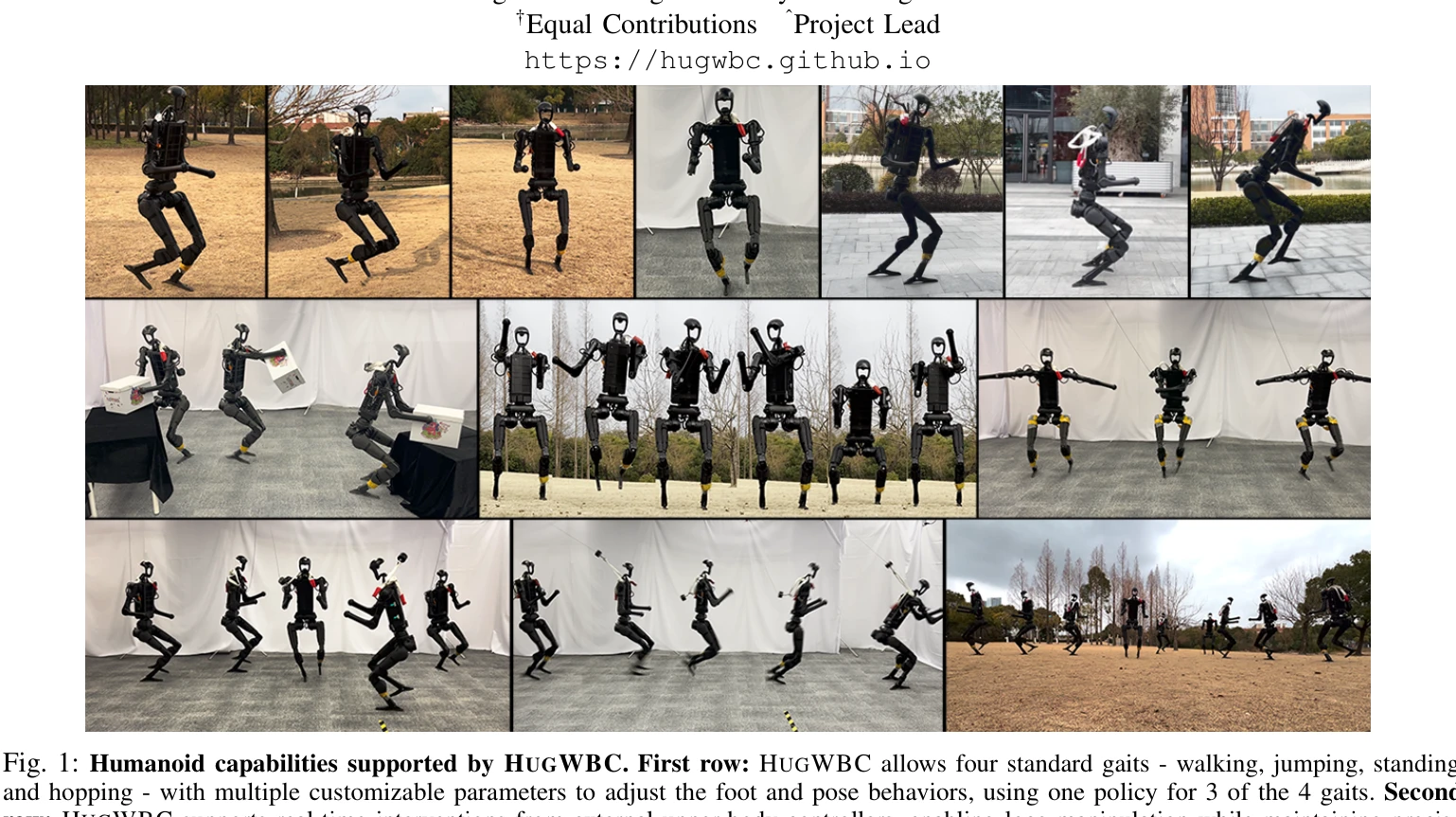
Fig. 1: Humanoid capabilities supported by HUGWBC. First row: HUGWBC allows four standard gaits - walking, jumping, stan
- 통합 정책: 4개 보행 행동 중 3개를 하나의 정책으로 제어 가능하며 8가지 명령에 대해 높은 추적 정확도 달성
- 명령 공간 확장: 속도, 발 높이, 주파수, 자세(높이, 허리 회전, 상체 피치) 등 기존 연구를 초과하는 포괄적 제어 인터페이스 제공
- 로코-조작 지원: 상반신 외부 제어기(텔레작업, IK 등)의 실시간 개입을 견딜 수 있는 robust 전신 컨트롤러로 다양한 조작 작업 가능
- 실제 로봇 검증: Unitree H1 로봇에서 광범위한 실험을 통해 높은 안정성과 강건성을 입증