Essence
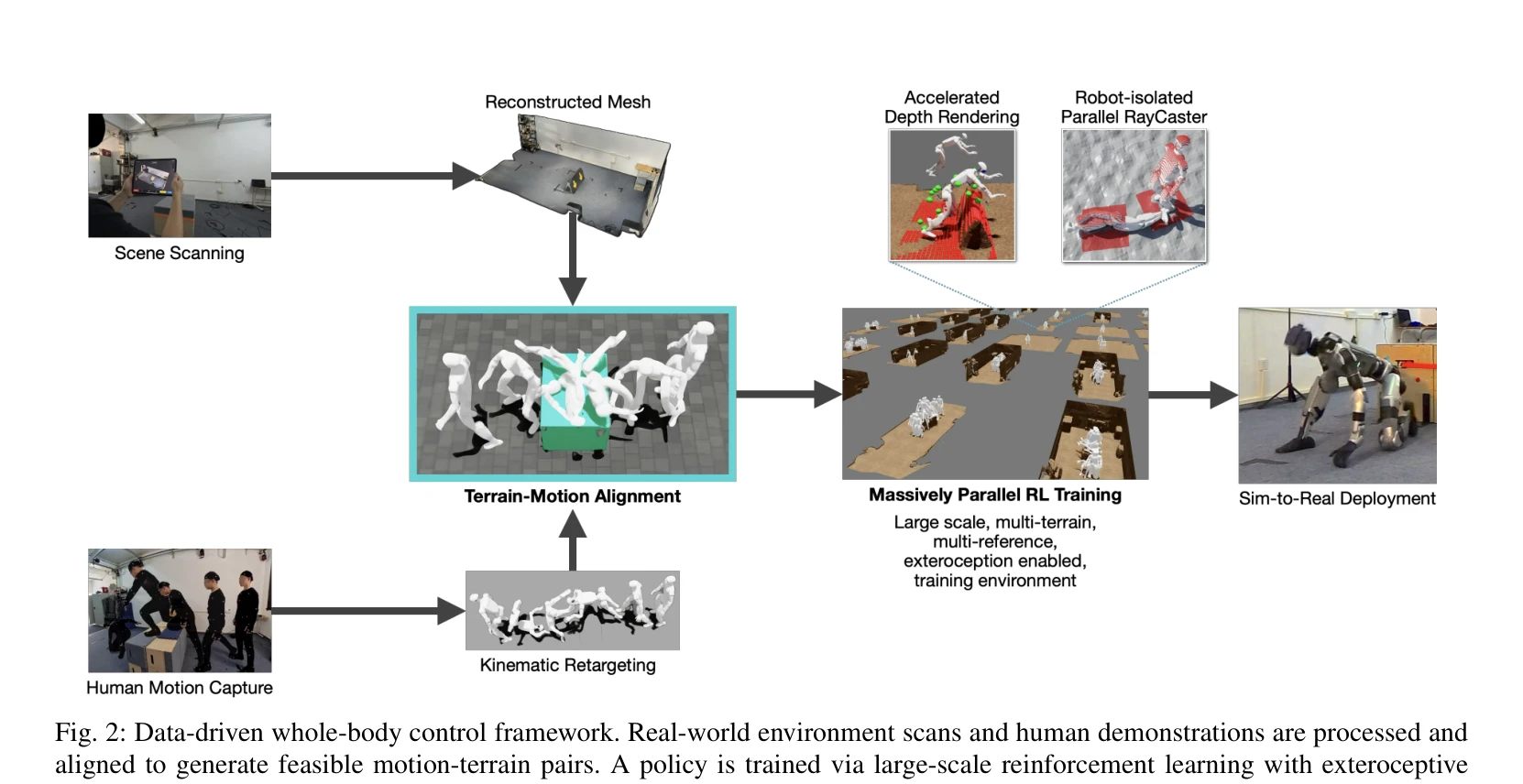
Fig. 2: Data-driven whole-body control framework. Real-world environment scans and human demonstrations are processed an
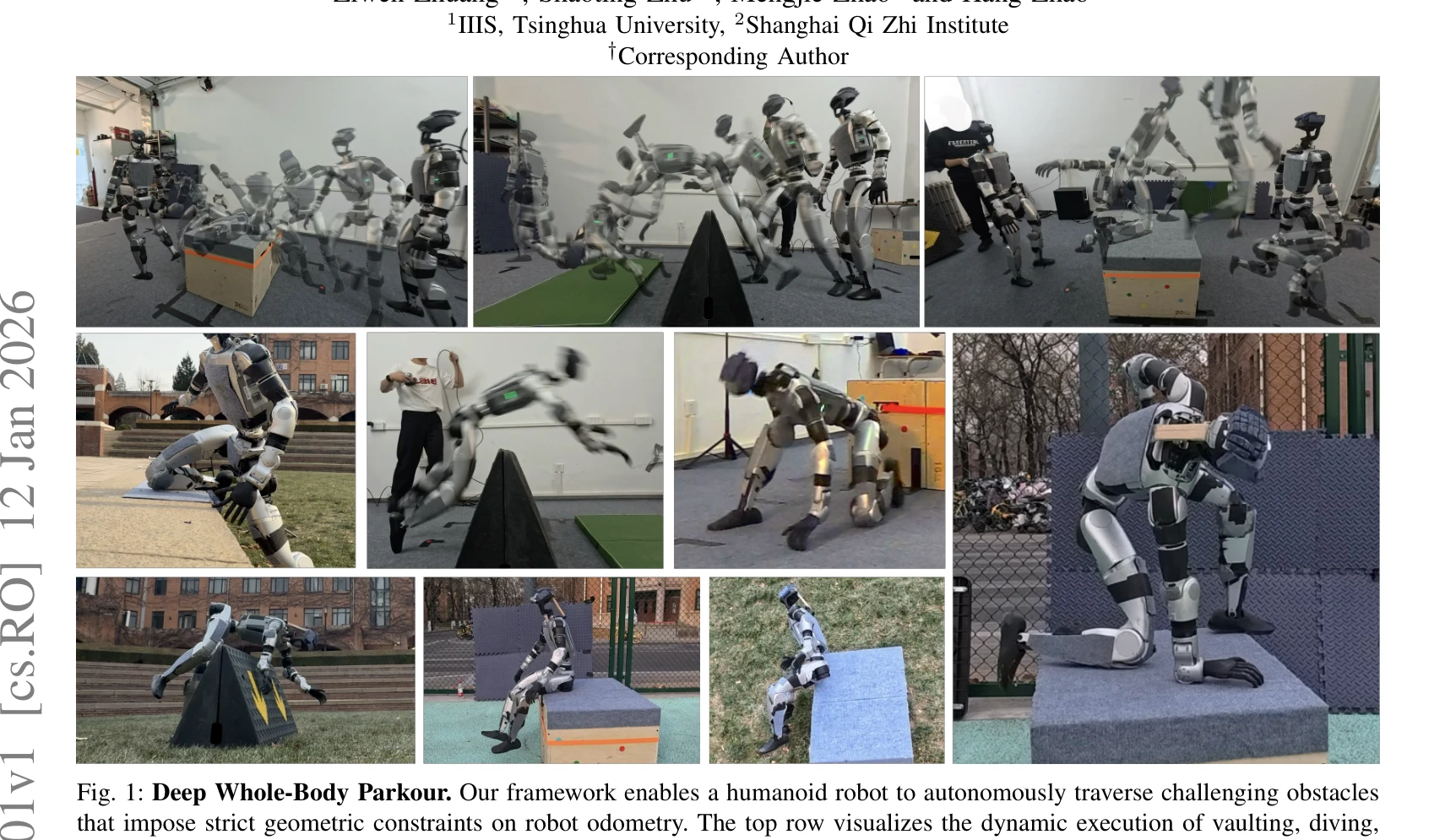
본 연구는 외부 센싱(depth perception)을 whole-body motion tracking에 통합하여 인간형 로봇이 불규칙한 지형에서 vaulting, dive-rolling 등의 동적 parkour 움직임을 수행하도록 하는 프레임워크를 제시한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 두 상충하는 제어 패러다임을 창의적으로 통합하여 humanoid robot의 traversability를 획기적으로 확장했으며, custom motion-terrain dataset과 최적화된 ray-casting algorithm은 기술적 기여도 충실하다. sim-to-real gap 해소와 실제 동작 검증으로 실무적 가치가 높으나, dataset 확장성과 타 robot morphology 적용에 개선 여지가 있다.