Essence
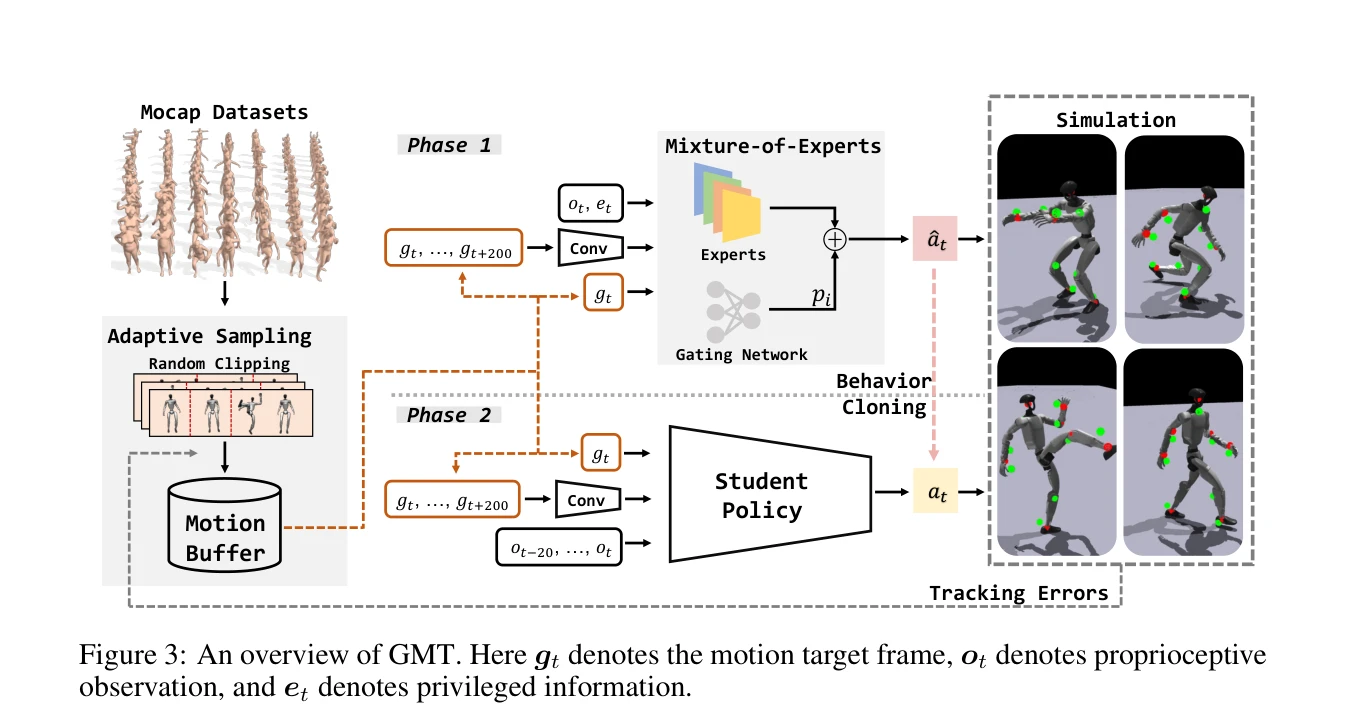
Figure 3: An overview of GMT. Here gt denotes the motion target frame, ot denotes proprioceptive
GMT는 humanoid 로봇이 다양한 전신 모션을 추적할 수 있도록 하는 통합 정책을 학습하는 프레임워크로, Adaptive Sampling 전략과 Motion Mixture-of-Experts 아키텍처를 핵심 요소로 제안한다.
저자: Zixuan Chen, Mazeyu Ji, Xuxin Cheng, Xuanbin Peng, Xue Bin Peng, Xiaolong Wang | 날짜: 2025-06-17 | URL: https://arxiv.org/abs/2506.14770 📄 PDF
Figure 3: An overview of GMT. Here gt denotes the motion target frame, ot denotes proprioceptive
GMT는 humanoid 로봇이 다양한 전신 모션을 추적할 수 있도록 하는 통합 정책을 학습하는 프레임워크로, Adaptive Sampling 전략과 Motion Mixture-of-Experts 아키텍처를 핵심 요소로 제안한다.
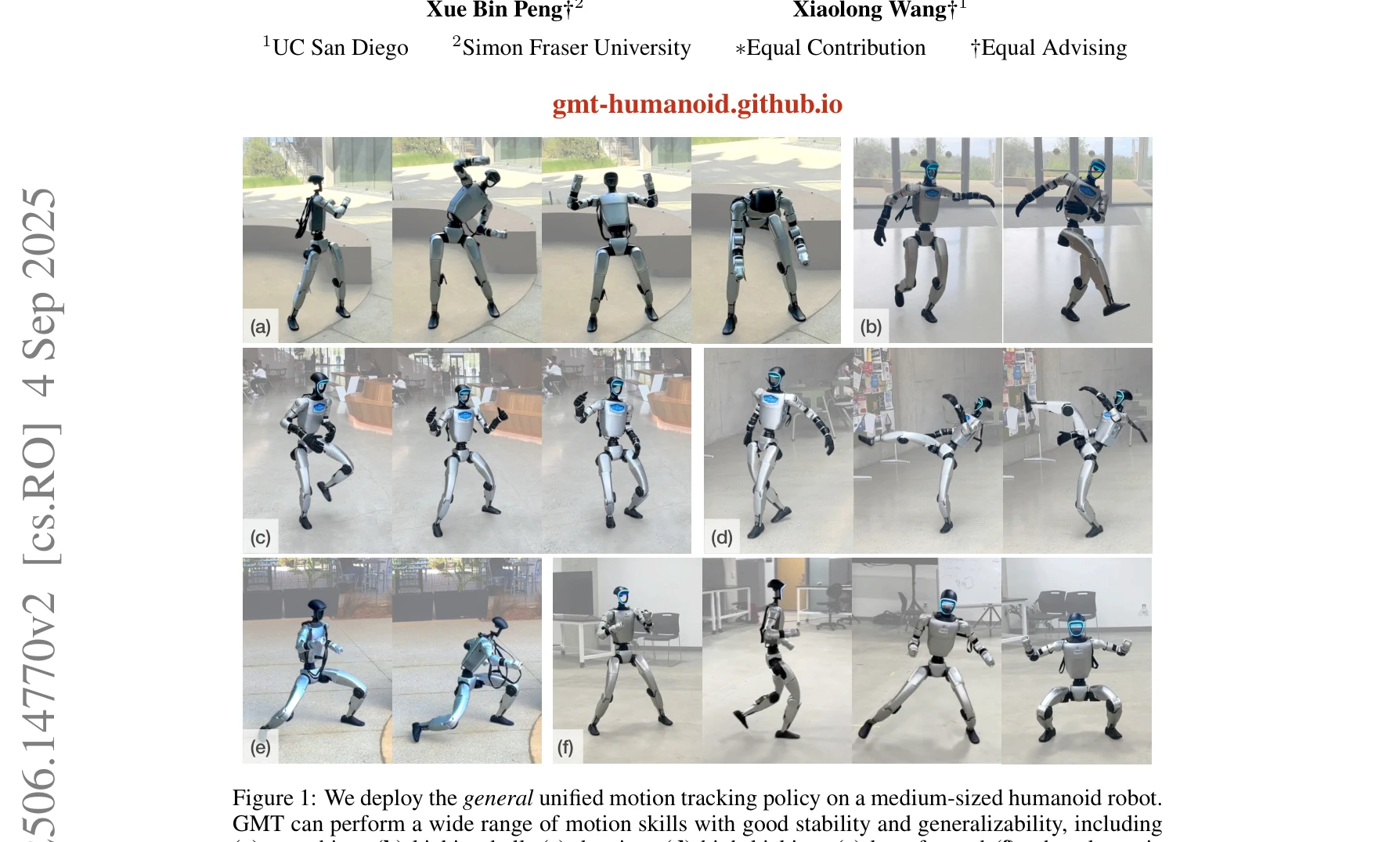
Figure 1: We deploy the general unified motion tracking policy on a medium-sized humanoid robot.
Figure 3: An overview of GMT. Here gt denotes the motion target frame, ot denotes proprioceptive
총평: GMT는 humanoid 로봇의 general motion tracking에 대한 실질적인 해결책을 제시하며, Adaptive Sampling과 Motion MoE라는 두 가지 실용적 기법으로 기존의 산발적 접근들을 통합한 우수한 연구이다. 실제 로봇 배포 성공과 상태-최첨단 성능은 높은 가치를 제시하지만, 더 광범위한 하드웨어 검증과 이론적 분석 강화가 필요하다.