Essence
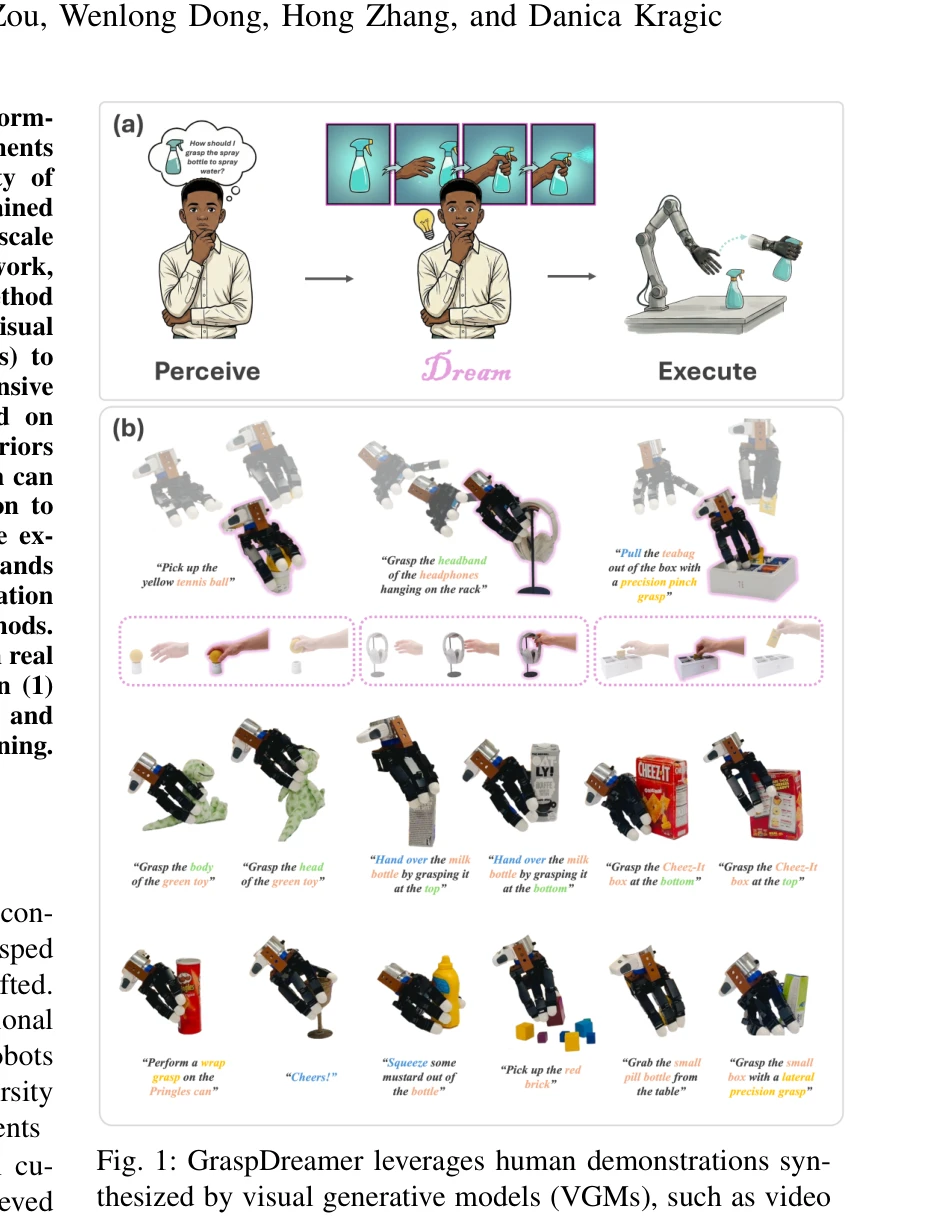
Fig. 1: GraspDreamer leverages human demonstrations syn-
Visual Generative Model (VGM)으로 생성한 인간 시연 비디오로부터 기능적 파지를 학습하여 실제 데이터 수집 없이 제로샷 로봇 파지를 가능하게 하는 GraspDreamer 방법을 제안한다. 인터넷 규모의 사전학습 데이터에 인코딩된 인간-물체 상호작용 프라이어를 활용하여 데이터 효율성과 일반화 성능을 동시에 달성한다.

