저자: Ilija Radosavovic, Bike Zhang, Baifeng Shi, Jathushan Rajasegaran, Sarthak Kamat, Trevor Darrell, Koushil Sreenath, Jitendra Malik | 날짜: 2024-02-29 | URL: https://arxiv.org/abs/2402.19469 📄 PDF
Essence
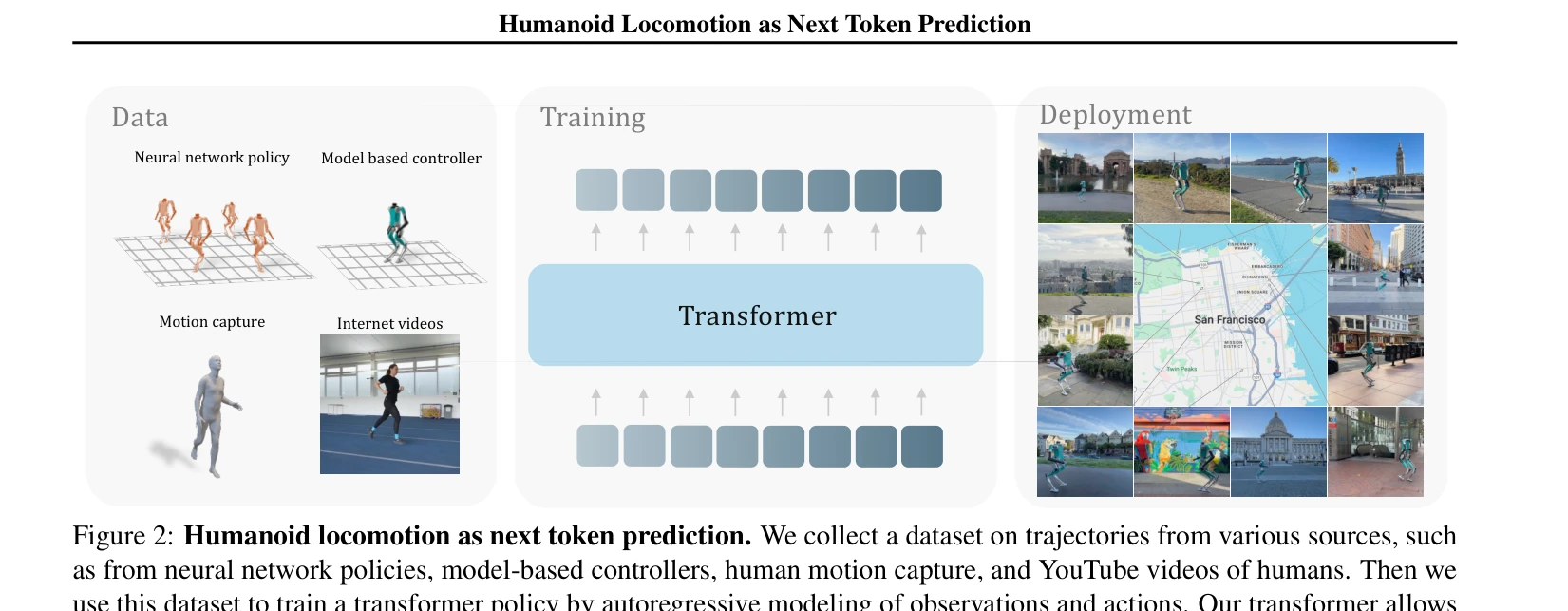
Figure 2: Humanoid locomotion as next token prediction. We collect a dataset on trajectories from various sources, such
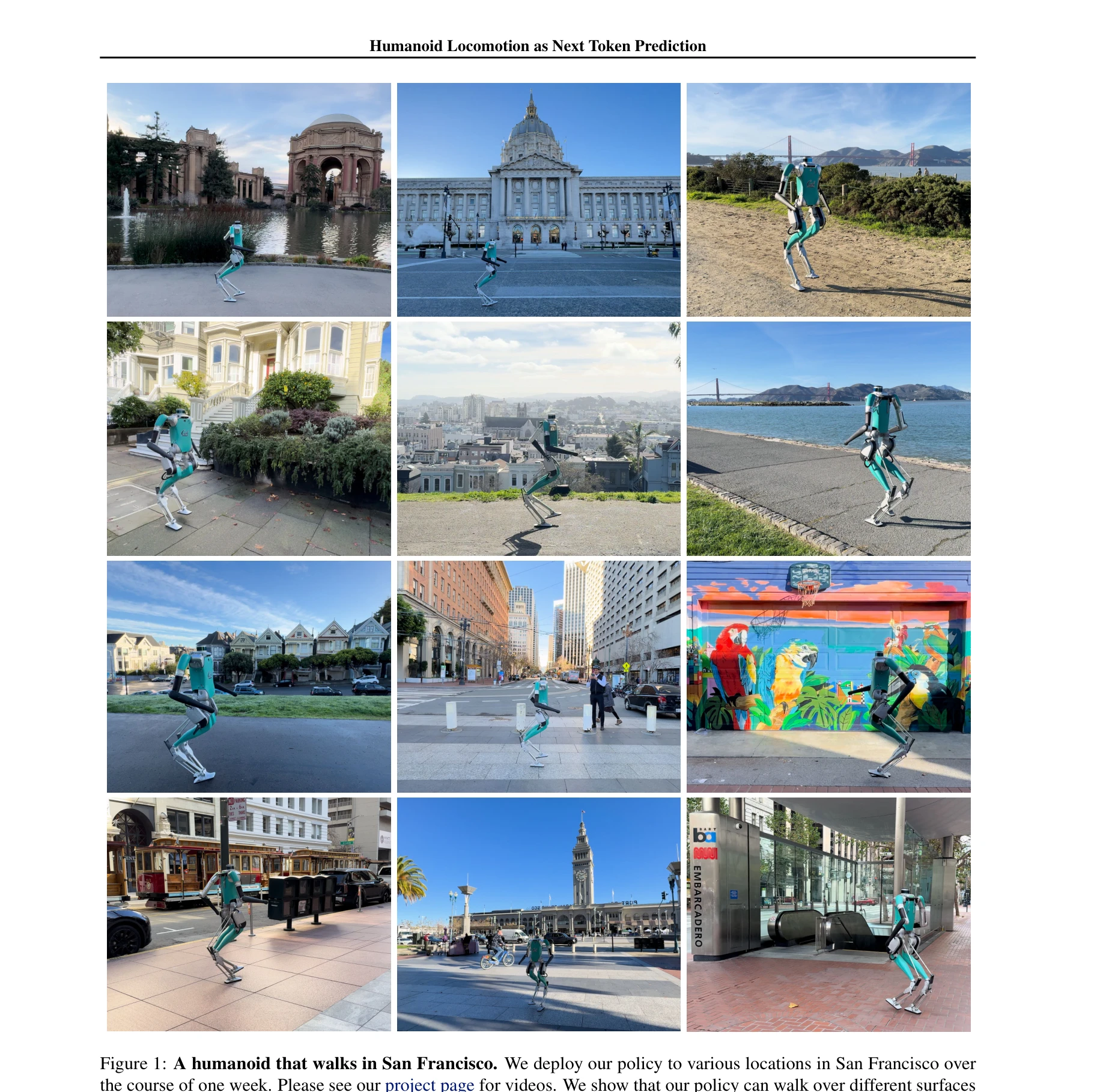
Humanoid 로봇 제어를 언어 모델의 next token prediction처럼 다루어, causal transformer를 통해 sensorimotor 궤적을 자동 회귀적으로 예측한다. 시뮬레이션, 모션캡처, 유튜브 영상 등 다양한 소스의 불완전한 데이터로 학습하여 실제 humanoid 로봇이 zero-shot으로 샌프란시스코에서 보행할 수 있게 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 언어 모델의 next token prediction 패러다임을 humanoid 제어에 창의적으로 적용하여, 불완전한 다중 소스 데이터로 학습한 모델이 실제 환경에서 zero-shot 보행을 가능하게 함을 입증했다. 생성 모델 기반의 로봇 제어 학습에 대한 유망한 방향을 제시하며, 실제 배포 결과는 매우 인상적이다.