저자: Ri-Zhao Qiu, Shiqi Yang, Xuxin Cheng, Chaitanya Chawla, Jialong Li, Tairan He, Ge Yan, David J. Yoon, Ryan Hoque, Lars Paulsen, Ge Yang, Jian Zhang, Sha Yi, Guanya Shi, Xiaolong Wang | 날짜: 2025-03-17 | URL: https://arxiv.org/abs/2503.13441 📄 PDF
Essence
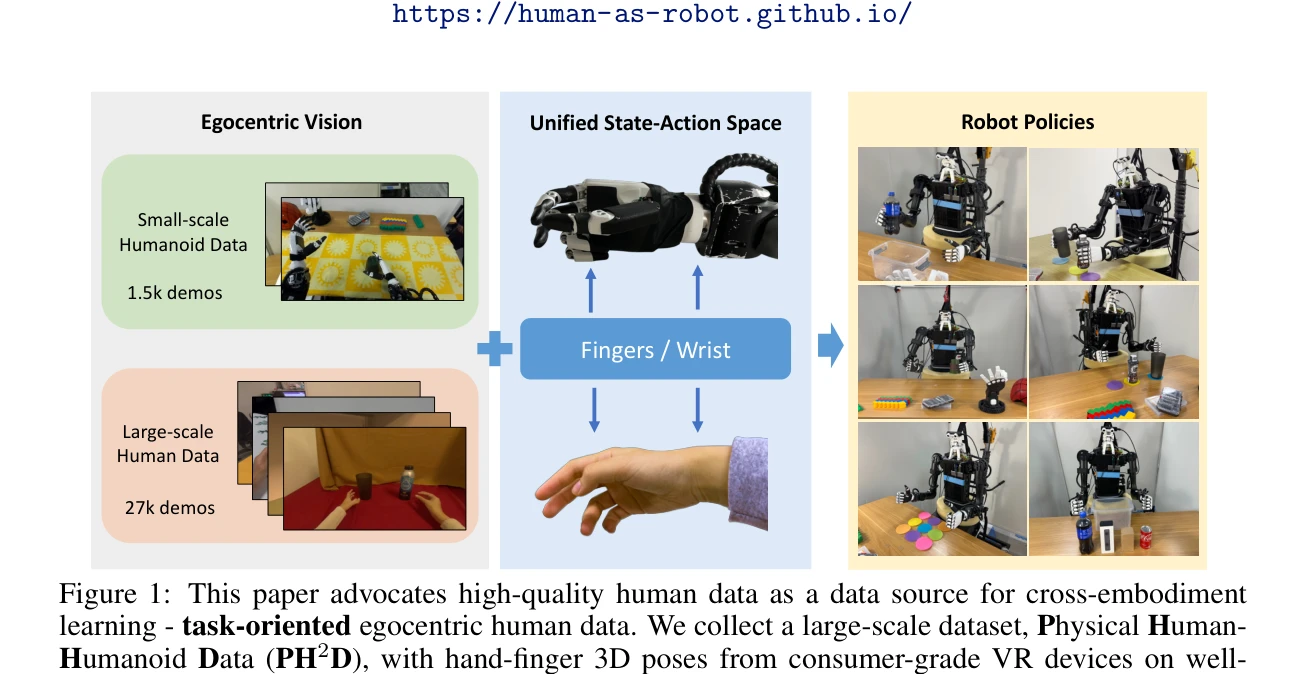
Figure 1: This paper advocates high-quality human data as a data source for cross-embodiment
휴머노이드 로봇 조작 정책 학습을 위해 대규모 자아중심 인간 데모를 cross-embodiment 학습 데이터로 활용하고, Human Action Transformer (HAT)를 통해 인간과 로봇을 통합된 상태-행동 공간에서 다양한 embodiment으로 모델링한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 로봇 조작 학습에서 대규모 인간 데이터 활용의 실질적 가치를 입증한 의미 있는 연구로, 통합된 state-action space와 체계적인 co-training 전략을 통해 embodiment 간극을 효과적으로 해소했으며, PH2D 데이터셋과 HAT 모델의 공개를 통해 cross-embodiment 학습 커뮤니티에 중요한 기여를 할 것으로 기대된다.