Essence
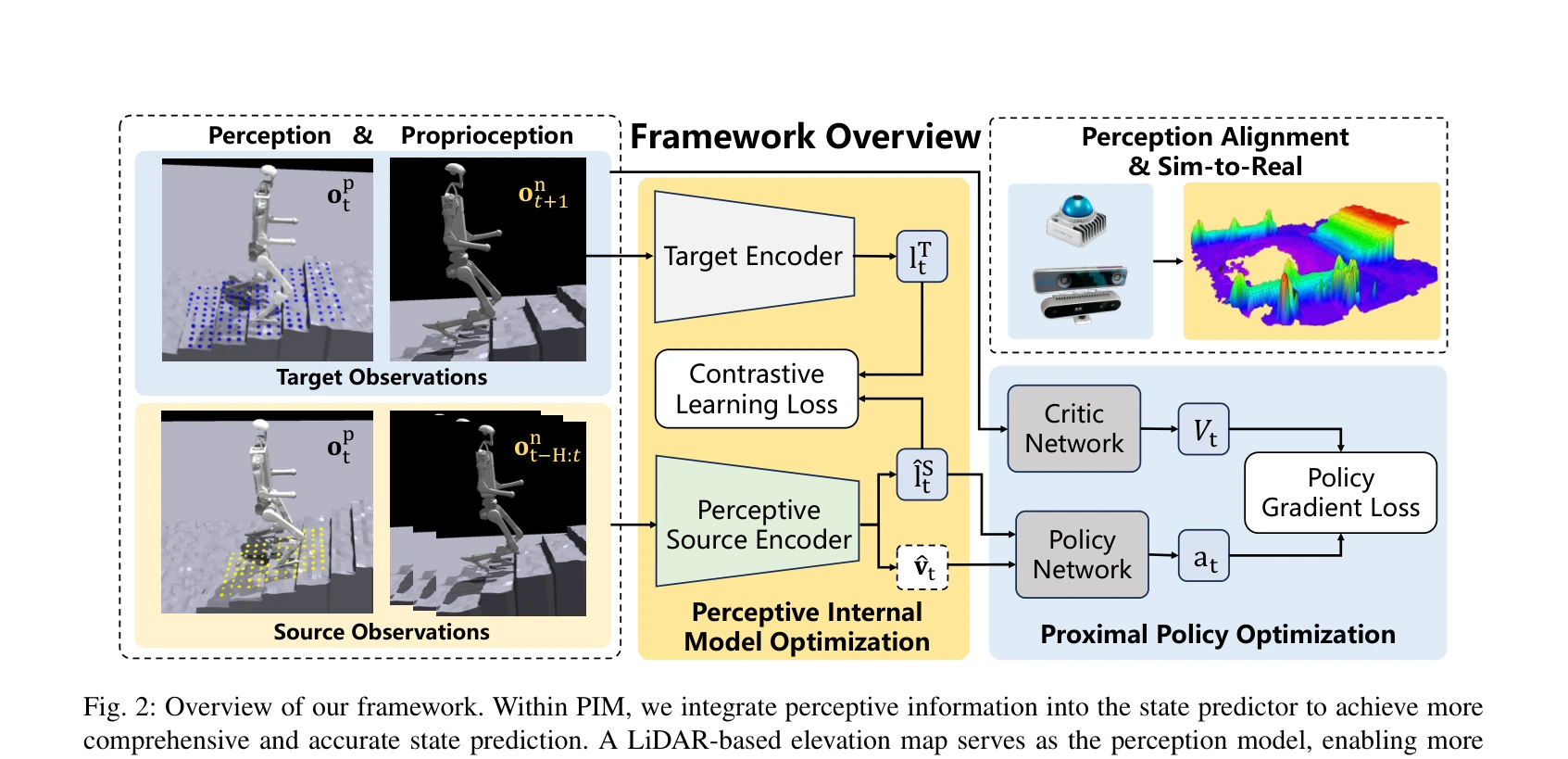
Fig. 2: Overview of our framework. Within PIM, we integrate perceptive information into the state predictor to achieve m
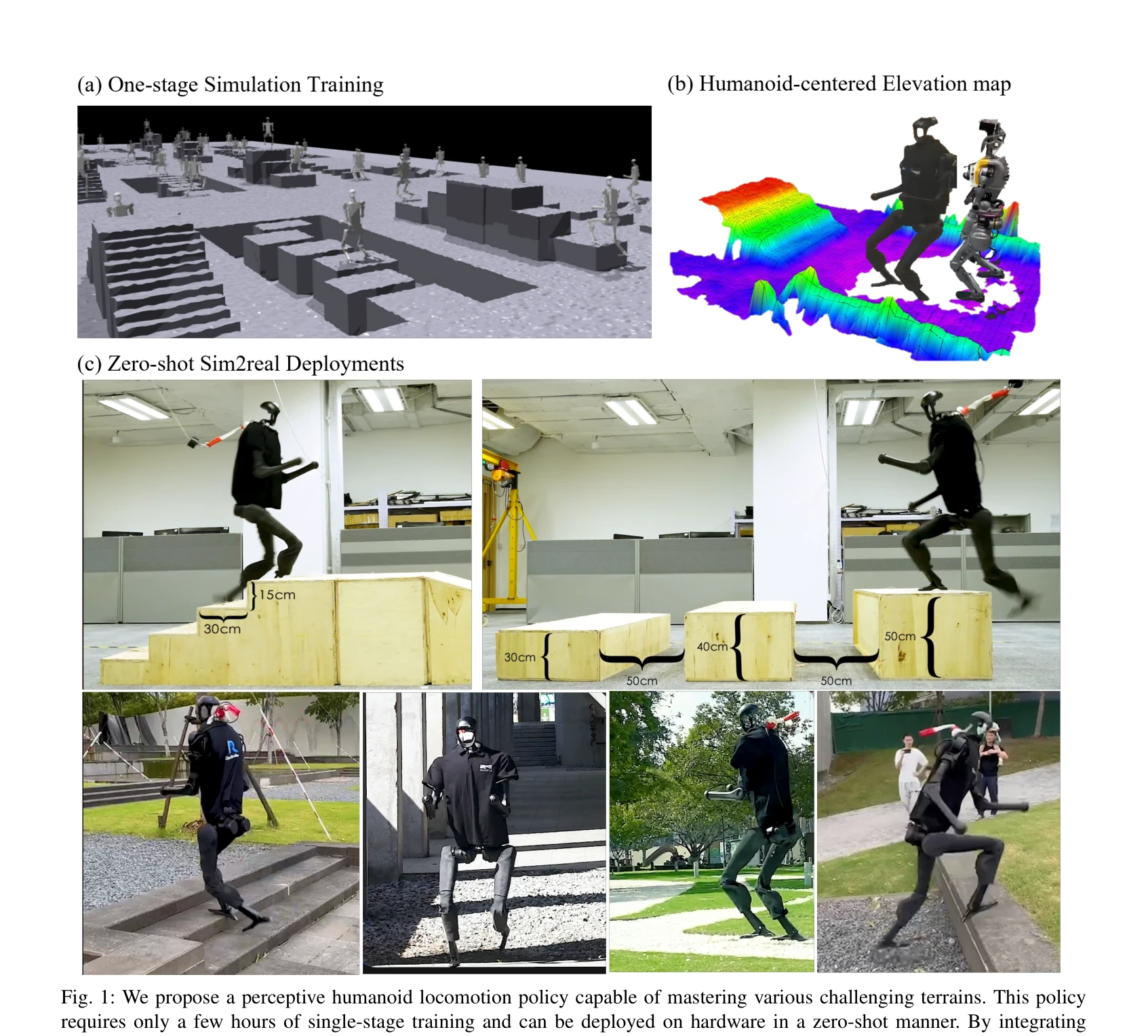
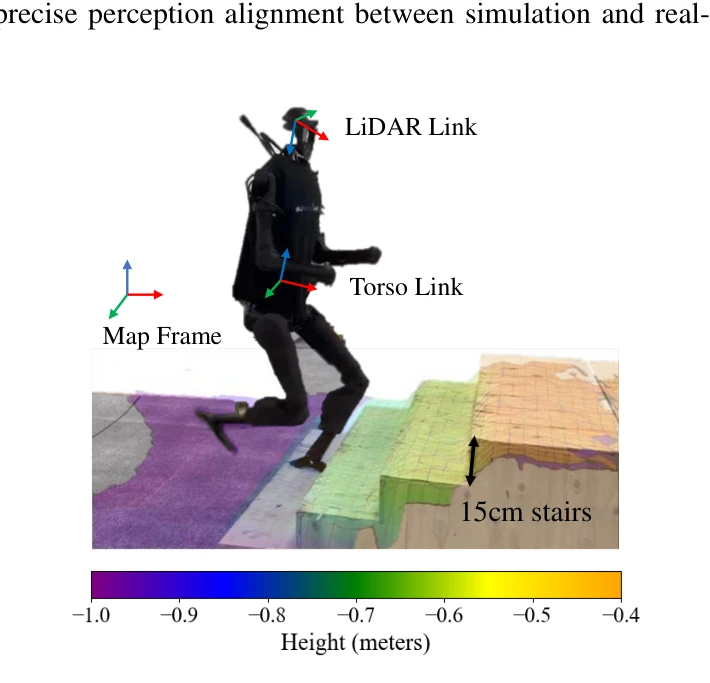
인간형 로봇의 안정적인 이동을 위해 온보드 elevation map을 기반으로 한 Perceptive Internal Model (PIM)을 제안하며, HIM을 확장하여 지각 정보를 통합한 단일 단계 학습 방법을 제시한다.