Essence
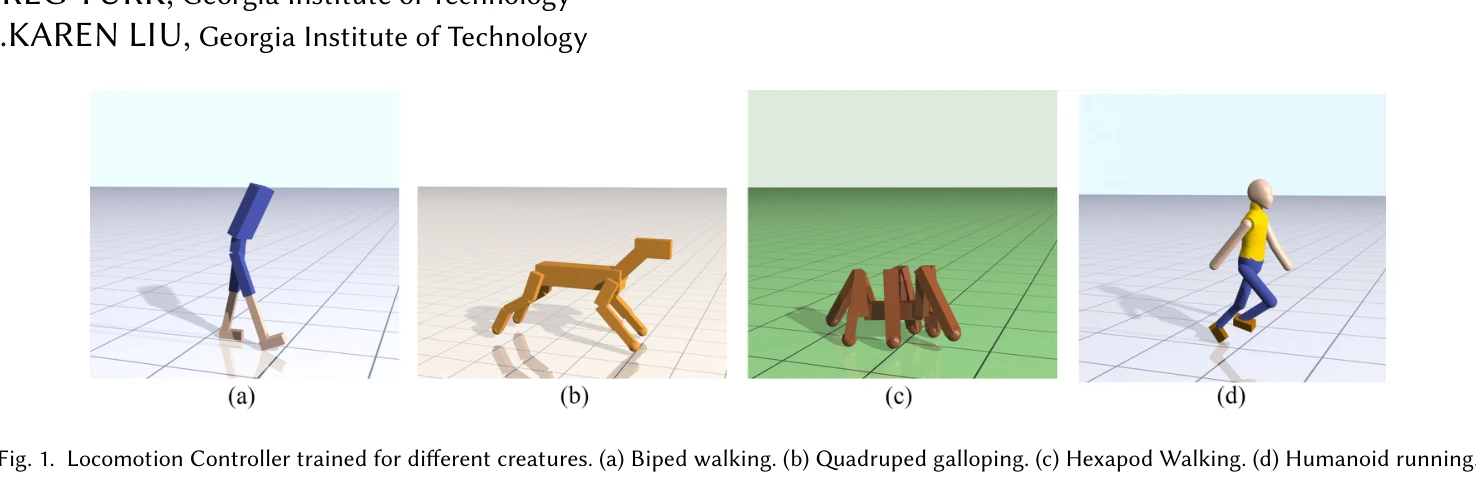
Fig. 1. Locomotion Controller trained for different creatures. (a) Biped walking. (b) Quadruped galloping. (c) Hexapod W
Deep Reinforcement Learning에 미러 대칭 손실 함수와 커리큘럼 학습을 적용하여 모션 캡처 데이터 없이 자연스럽고 저에너지의 대칭적인 로코모션을 학습하는 방법을 제안한다.
저자: Wenhao Yu, Greg Turk, C. Karen Liu | 날짜: 2018-01-24 | URL: https://arxiv.org/abs/1801.08093 📄 PDF
Fig. 1. Locomotion Controller trained for different creatures. (a) Biped walking. (b) Quadruped galloping. (c) Hexapod W
Deep Reinforcement Learning에 미러 대칭 손실 함수와 커리큘럼 학습을 적용하여 모션 캡처 데이터 없이 자연스럽고 저에너지의 대칭적인 로코모션을 학습하는 방법을 제안한다.
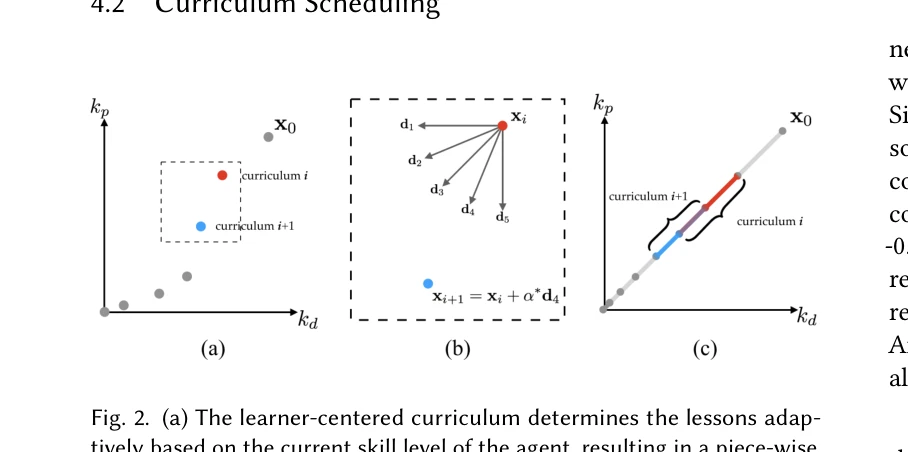
Fig. 2. (a) The learner-centered curriculum determines the lessons adap-
총평: 본 논문은 미러 대칭 손실과 adaptive curriculum learning을 결합하여 DRL 기반 로코모션 학습의 오래된 문제(부자연스러움, 고에너지)를 우아하게 해결하며, 다양한 형태에 일반화 가능한 점에서 높은 독창성과 실용성을 갖춘 우수한 연구이다.