Essence
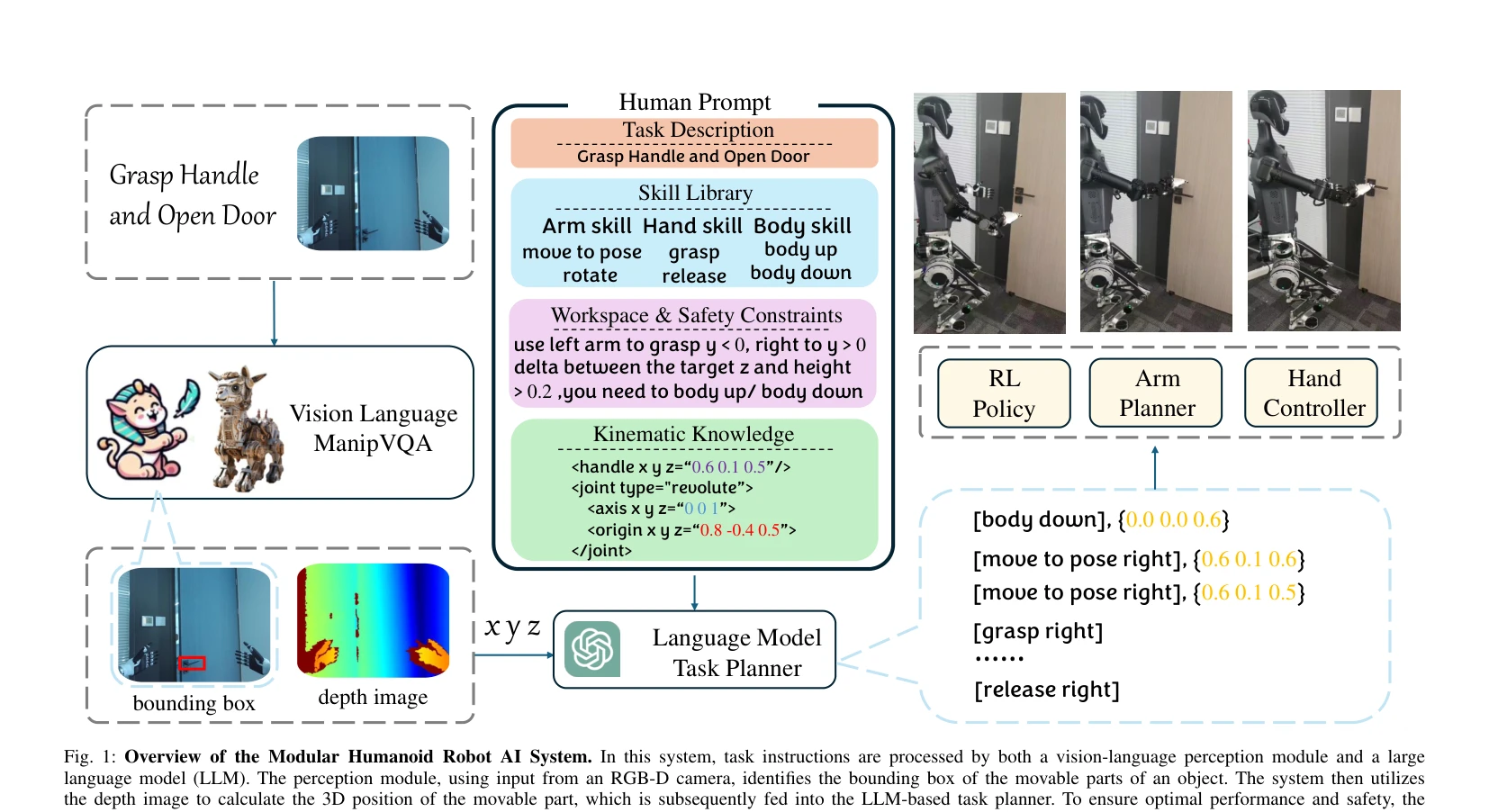
Fig. 1: Overview of the Modular Humanoid Robot AI System. In this system, task instructions are processed by both a visi
LLM, VLM, RL을 통합한 모듈식 인간형 로봇 AI 시스템 Trinity를 제안하여 복잡한 환경에서 효율적인 제어를 실현한다. 계층적 아키텍처를 통해 언어 이해, 시각 인식, 동작 제어를 조화롭게 수행한다.
저자: Jingkai Sun, Qiang Zhang, Gang Han, Wen Zhao, Zhe Yong, Yan He, Jiaxu Wang, Jiahang Cao, Yijie Guo, Renjing Xu | 날짜: 2025-03-11 | URL: https://arxiv.org/abs/2503.08338 📄 PDF
Fig. 1: Overview of the Modular Humanoid Robot AI System. In this system, task instructions are processed by both a visi
LLM, VLM, RL을 통합한 모듈식 인간형 로봇 AI 시스템 Trinity를 제안하여 복잡한 환경에서 효율적인 제어를 실현한다. 계층적 아키텍처를 통해 언어 이해, 시각 인식, 동작 제어를 조화롭게 수행한다.
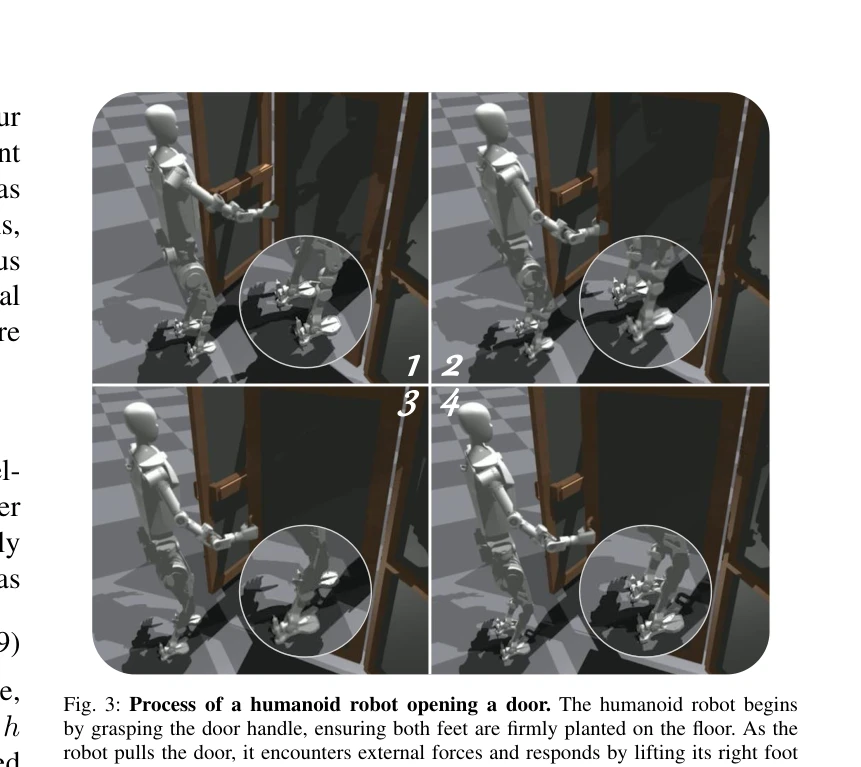
Fig. 3: Process of a humanoid robot opening a door. The humanoid robot begins
Fig. 1: Overview of the Modular Humanoid Robot AI System. In this system, task instructions are processed by both a visi
총평: Trinity는 RL, LLM, VLM을 효과적으로 통합한 혁신적 인간형 로봇 AI 시스템으로, 모듈식 설계를 통해 유연성과 해석성을 확보하고 실제 로봇에서의 동작을 입증함으로써 구현적 가치가 높다. 다만 sim-to-real 갭과 모듈 간 상호작용의 견고성에 대한 심화 분석이 필요하다.