Essence
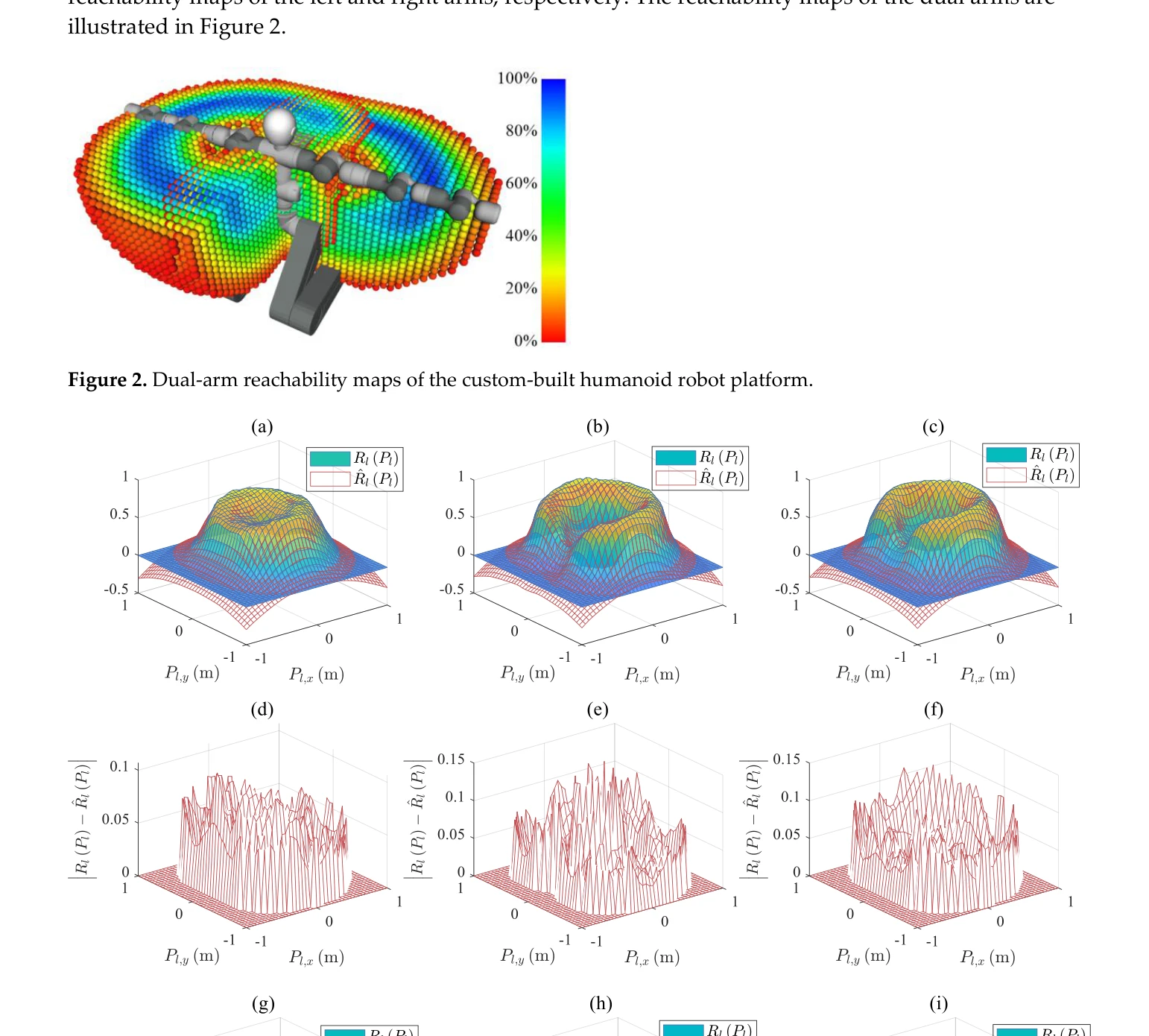
Figure 2. Dual-arm reachability maps of the custom-built humanoid robot platform.
본 논문은 인간형 로봇의 비파지형 물체 운반 원격조종 작업에서 다중 제약 조건 간 충돌과 안전 문제를 해결하기 위해 계층적 3단계 구조의 Multiple-Constraint Safety-Critical Control Framework (MC-SCCF)를 제안한다. 상층부는 미분가능한 도달가능성 대리 모델과 개선된 control barrier function 기반 안전 속도 필터로 작업공간 경계에서의 안전성을 보장하고, 중층부는 사용자 명령을 자세 결합 참조 궤적으로 매핑하여 물체의 미끄러짐과 넘어짐을 방지하며, 하층부는 QP 기반 역운동학 해석기로 자체 충돌 회피와 조정된 운동을 달성한다.
Achievement
Figure 2. Dual-arm reachability maps of the custom-built humanoid robot platform.
MC-SCCF의 계층적 프레임워크: 다중 제약 조건 간 충돌을 체계적으로 해결하여 전신 운동과 작업 동역학의 조정 가능. 개선된 안전 속도 필터: 가속도 제약 기반의 개선된 control barrier function으로 작업공간 경계 접근 시 물체의 자세 흔들림을 제거하면서도 부드러운 감속 실현. 미분가능한 도달가능성 대리 모델: 이중팔 협력 작업의 실시간 고정밀도 도달가능성 평가로 경계 근처에서의 정밀한 자세 조정 가능. 통합 운동학적 제약 처리: QP 기반 역운동학 해석기로 자체 충돌 회피, 조정된 운동, 구성 최적화, 관절/조종가능성 한계를 동시에 만족.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 인간형 로봇의 복잡한 비파지형 운반 작업에서 다중 충돌 제약을 체계적으로 해결하기 위한 계층적 MC-SCCF를 제시하며, 미분가능한 도달가능성 대리 모델과 개선된 control barrier function 기반의 안전 속도 필터는 기술적 참신성을 보여준다. 시뮬레이션과 물리적 로봇 실험으로 유효성을 입증했으나, 대리 모델의 일반화 가능성, 환경 변수 견고성, 계산 성능 벤치마크 등에 대한 상세 분석이 보완되면 더욱 강화될 수 있다.