Essence
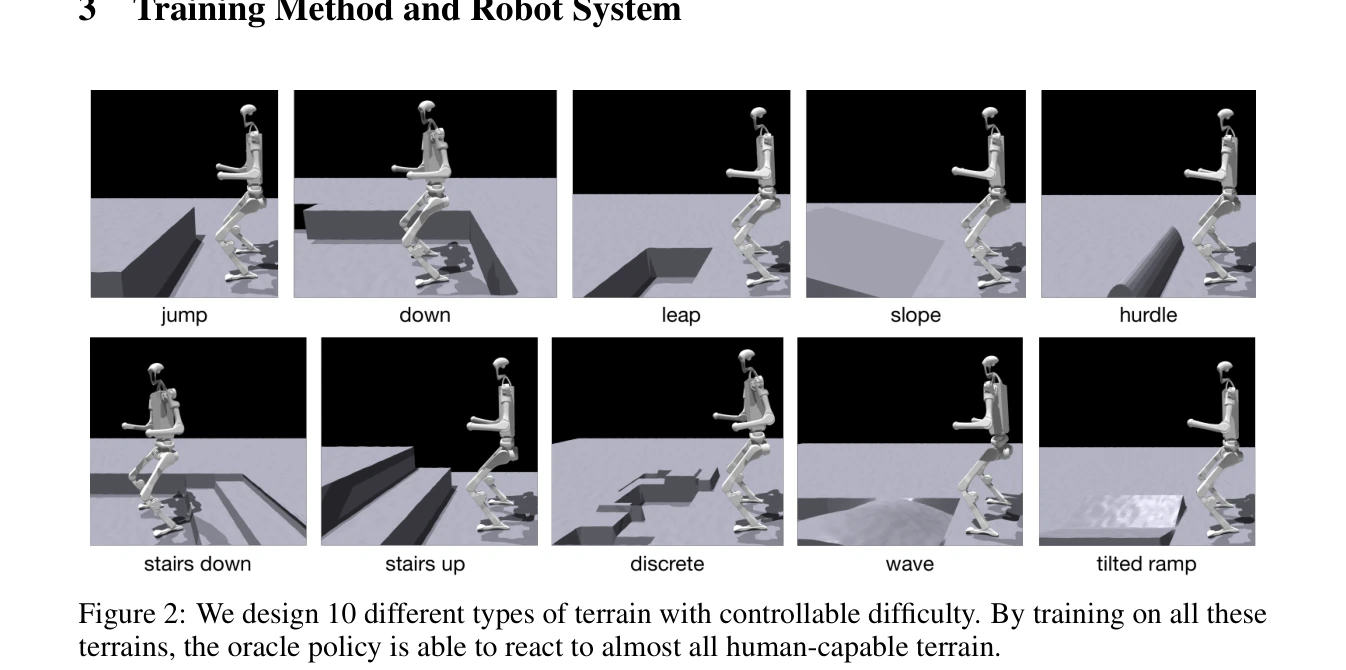
Figure 1: We present a single vision-based end-to-end whole-body-control parkour policy for humanoid robots
본 논문은 인간형 로봇이 motion prior 없이 end-to-end vision-based 정책으로 다양한 parkour 기술을 학습할 수 있는 프레임워크를 제시한다. Fractal noise를 활용한 terrain randomization과 DAgger를 통한 vision policy 증류로 sim-to-real transfer를 달성하며, 실제 로봇에서 0.42m 점프, 0.8m gap 통과, 1.8m/s 주행 등을 성공한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 인간형 로봇의 parkour learning에서 motion prior 제거와 fractal noise 기반 자동 foot-raising 유도라는 중요한 기여를 제시한다. 3단계 훈련 파이프라인과 DAgger 증류를 통한 sim-to-real transfer는 기술적으로 견고하며, 실제 로봇에서의 다양한 성공 사례는 실용적 가치가 높다. 다만 직선 track 제약, 정량적 평가 부족, 일반화 가능성 검증 미흡이 한계이나, 인간형 로봇의 agile locomotion 분야에 상당한 진전을 이루었다.