저자: Yifan Sun, Rui Chen, Kai S. Yun, Yikuan Fang, Sebin Jung, Feihan Li, Bowei Li, Weiye Zhao, Changliu Liu | 날짜: 2025-02-05 | URL: https://arxiv.org/abs/2502.03132 📄 PDF
Essence
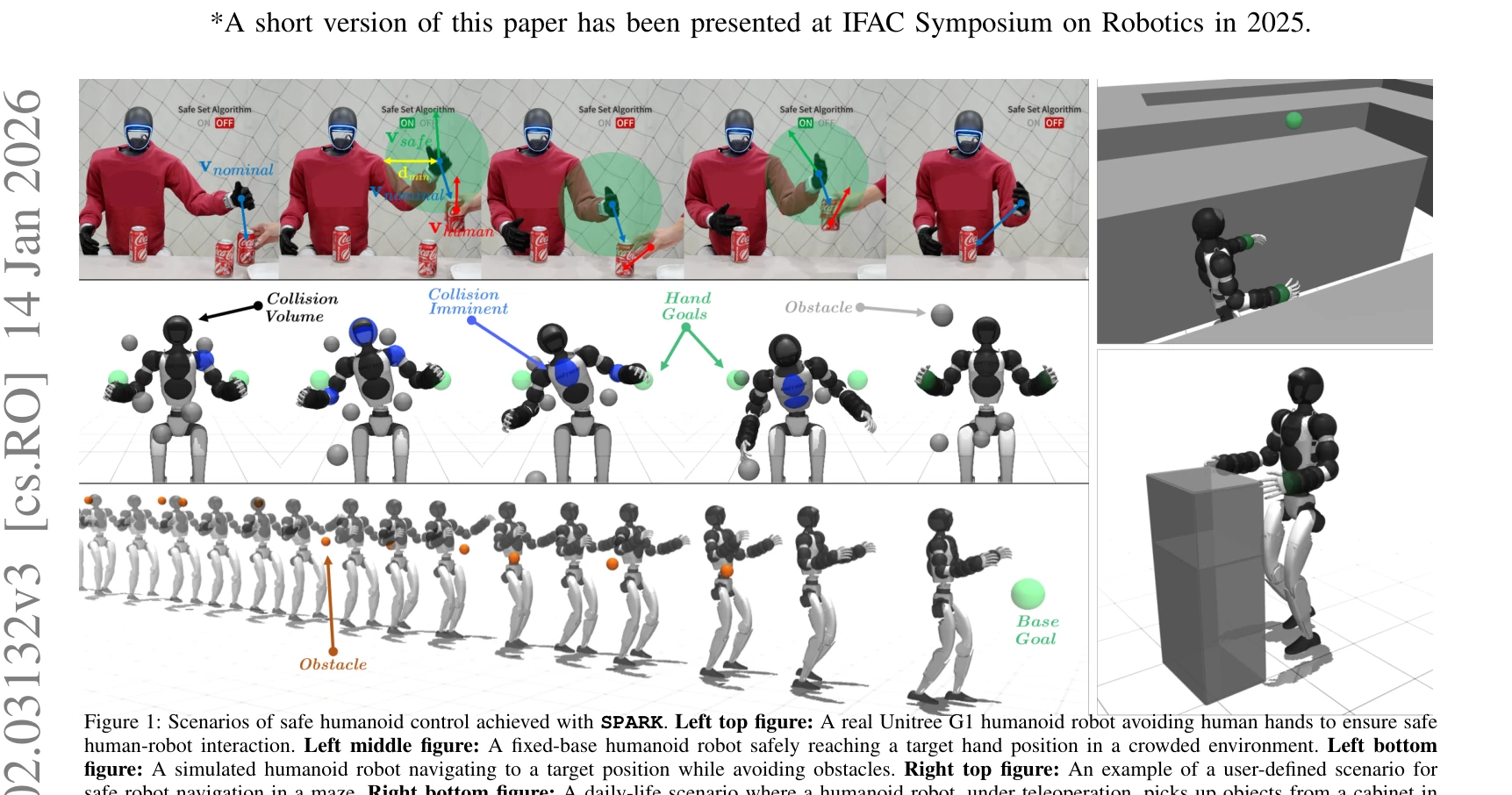
Figure 1: Scenarios of safe humanoid control achieved with SPARK. Left top figure: A real Unitree G1 humanoid robot avoi
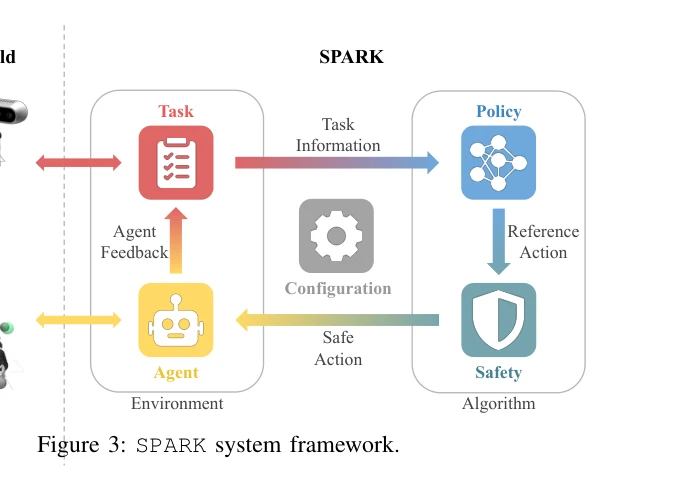
본 논문은 인형 로봇의 안전한 자율주행 및 원격 조종을 위한 종합적인 벤치마크 및 도구 모음인 SPARK를 제시한다. 모듈 방식의 composable, extensible, deployable 설계를 통해 사용자가 커스텀 안전 조건과 작업 목표를 쉽게 구성하고 실제 로봇에 배포할 수 있도록 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: SPARK는 인형 로봇의 안전한 배포를 위한 실질적이고 실용적인 솔루션을 제시하는 고가치의 도구 논문이다. Composable, extensible, deployable 설계 원칙을 통해 기존 개별 알고리즘들의 통합과 재사용성을 크게 향상시켰으며, 시뮬레이션-실제 로봇 간의 연결고리를 제공한다. 다만 새로운 알고리즘 기여보다는 engineering 측면의 도구 개발에 초점이 있으므로 이론적 혁신성은 제한적이다. 로봇 안전 연구 커뮤니티에 실질적인 가치를 제공할 수 있는 고품질의 플랫폼 논문이다.