저자: Kourosh Darvish, Luigi Penco, Joao Ramos, Rafael Cisneros, Jerry Pratt, Eiichi Yoshida, Serena Ivaldi, Daniele Pucci | 날짜: 2023-01-11 | URL: https://arxiv.org/abs/2301.04317 📄 PDF
Essence
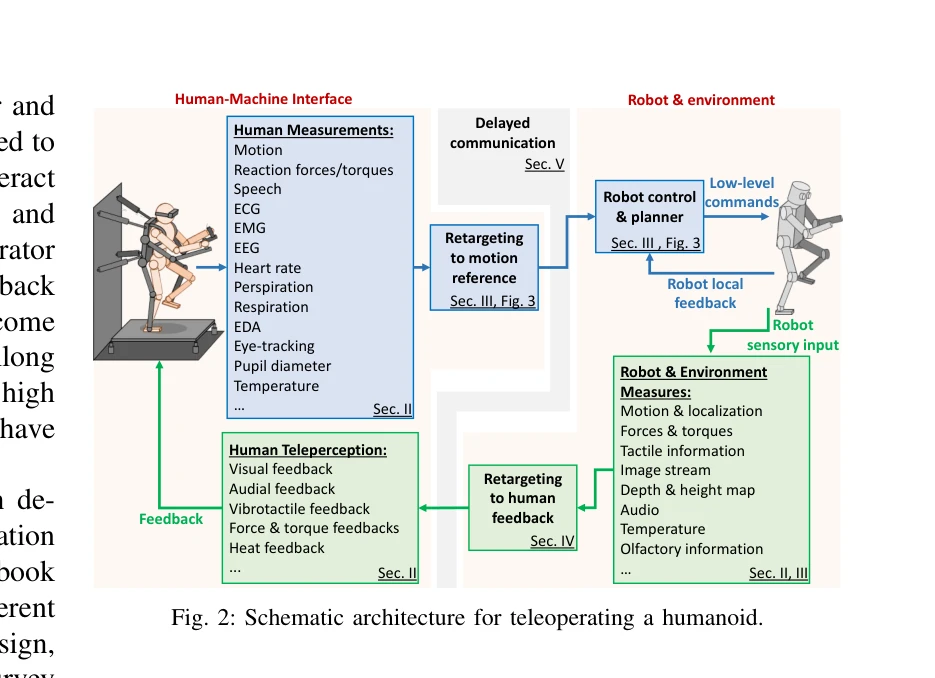
Fig. 2: Schematic architecture for teleoperating a humanoid.
본 논문은 humanoid robot teleoperation에 대한 포괄적인 survey로, 원격 환경에서 인간의 인지 능력과 humanoid robot의 물리적 능력을 통합하는 teleoperation 시스템의 아키텍처, 기술적 조화, 그리고 응용 분야를 체계적으로 분석한다. Teleoperation system의 전체 파이프라인과 각 구성 요소를 상세히 제시하며, 통신 지연, 제어, retargeting, 인간-로봇 상호작용 등 다층적 도전 과제들을 다룬다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 humanoid robot teleoperation 분야의 첫 번째 포괄적 survey로, 시스템 아키텍처, 기술적 도전 과제, 그리고 실제 응용을 통합적으로 다룬다. 웹 기반 자료까지 제공하여 학계의 접근성을 높였으나, 이론적 깊이와 정량적 성능 비교 분석이 추가되면 더욱 강화될 수 있다. 고위험 원격 작업의 안전성과 효율성이 중요해지는 시대에 매우 시의적절하고 가치 있는 기여이다.