Essence
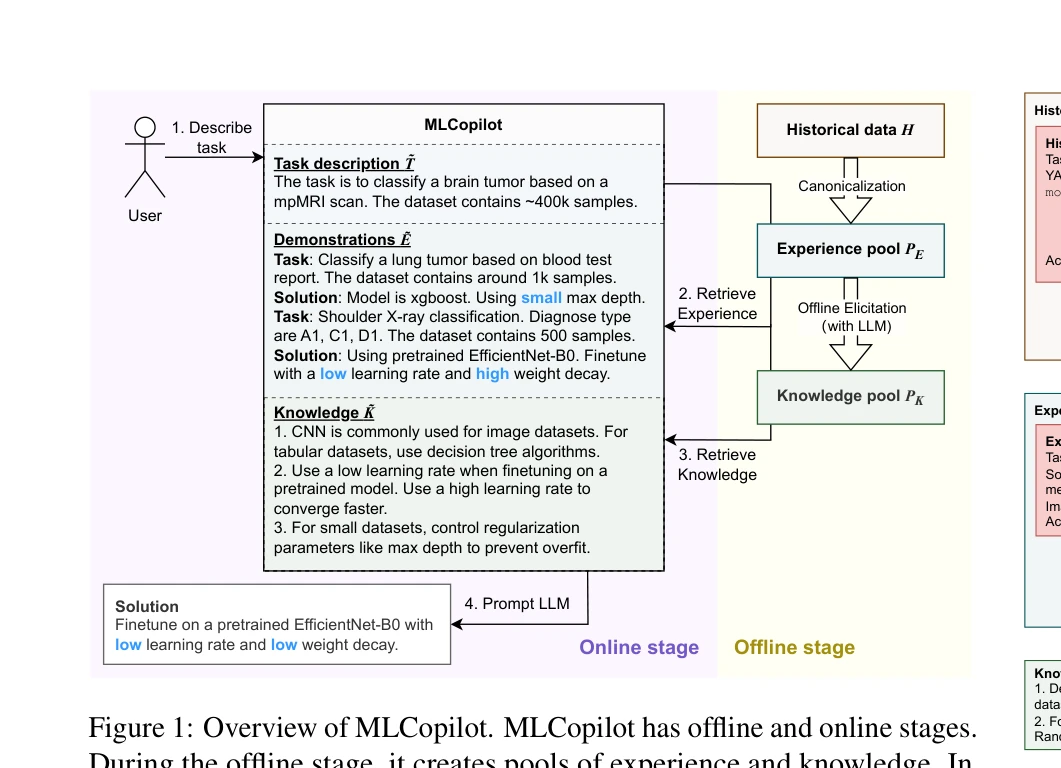
MLCopilot의 오프라인 및 온라인 단계 개요
대규모 언어 모델(LLM)을 활용하여 과거 ML 작업의 경험으로부터 지식을 추출하고, 새로운 ML 작업에 대한 솔루션을 즉시 제시하는 프레임워크를 제안한다. 이는 시간이 많이 소요되는 AutoML 방식과 달리 인간의 문제 해결 방식을 모방한 해석 가능한 솔루션을 제공한다.
같이 보면 좋은 논문
기반 연구
ReAct는 추론과 행동을 결합한 LLM의 시너지를 다루며, MLCopilot의 인간 유사 문제해결 플로우에 근간이 된다.
기반 연구
AutoML과 LLM 기반 지원 방식의 장단점, 실제 현장 적용상의 도전 과제를 최신 관점에서 정리해 MLcopilot의 실용성 및 한계를 비판적으로 조망할 수 있습니다.
기반 연구
568번 논문은 수학 정리와 증명 데이터의 대량 합성 시스템을 소개하여, 543번의 데이터 기반 솔루션 제안 및 자동화에 필요한 데이터 운용 기반을 제공합니다.
기반 연구
대형언어모델을 다양한 과학 실험 로봇/센서 제어에 접목하는 프레임워크로, QCopilot의 다중 에이전트 전략 설계에 근거가 된다.
다른 접근
LLM을 활용한 AutoML 또는 기계학습 자동화의 유사한 접근 방식을 다룬다.
다른 접근
의미론적 텍스트 분석을 위한 구문 정보 활용 모델을 제안한 관련 연구이다.
다른 접근
121번은 완전 자동화 오토ML 멀티에이전트 방식으로, MLCopilot의 해석적 에이전트 구조와 대조적 비교가 가능합니다.
다른 접근
MLCopilot 역시 LLM 기반으로 하이퍼파라미터 및 ML 작업 최적화 문제를 다루지만, 사람의 경험 전이와 해석성에 더 집중합니다.
다른 접근
016의 기존 AutoML 벤치마킹과 달리 543은 LLM을 활용한 기계학습 협업 자동화에 집중하여 서로 다른 방법론을 제안합니다.
다른 접근
멀티모달 분자 표현 학습을 통해 화학 물성 예측의 성능을 향상시키는 관련 연구이다.
다른 접근
과학‧공학 코드 작성 보조를 위한 LLM 코파일럿의 다각적 기능과 실제 사례를 비교해볼 수 있음.
후속 연구
MLR-COPILOT은 LLM 기반 파일 조작 및 실험 자동화 전반으로 적용 범위를 넓혀, LLM을 이용한 AI 기반 연구 자동화의 실질적 확장 예시를 제공한다.
후속 연구
543(MLCopilot)은 LLM 기반 복잡한 텍스트 분석과 대규모 데이터 해석을 지원하는 시스템으로, 511의 인간코더 능가 사례의 실질적 도구화·응용 예시다.
응용 사례
MLCopilot은 ReAct개의 reasoning-action 결합 모델 구조를 자동화된 ML 실험에 응용한 실제 사례를 보여준다.
응용 사례
실행 가능한 코드 기반 행위의 시범 사례를 통해, ML 작업 솔루션 자동 생성에서 LLM의 도구 사용/행동 연계 방법을 실무에 적용할 수 있습니다.
응용 사례
Domain-specific ReAct for physics-integrated iterative modeling은 ReAct 프레임워크를 실제 물리 모델링 문제에 적용한 사례로, MLCopilot의 확장 가능성을 보여준다.