Essence
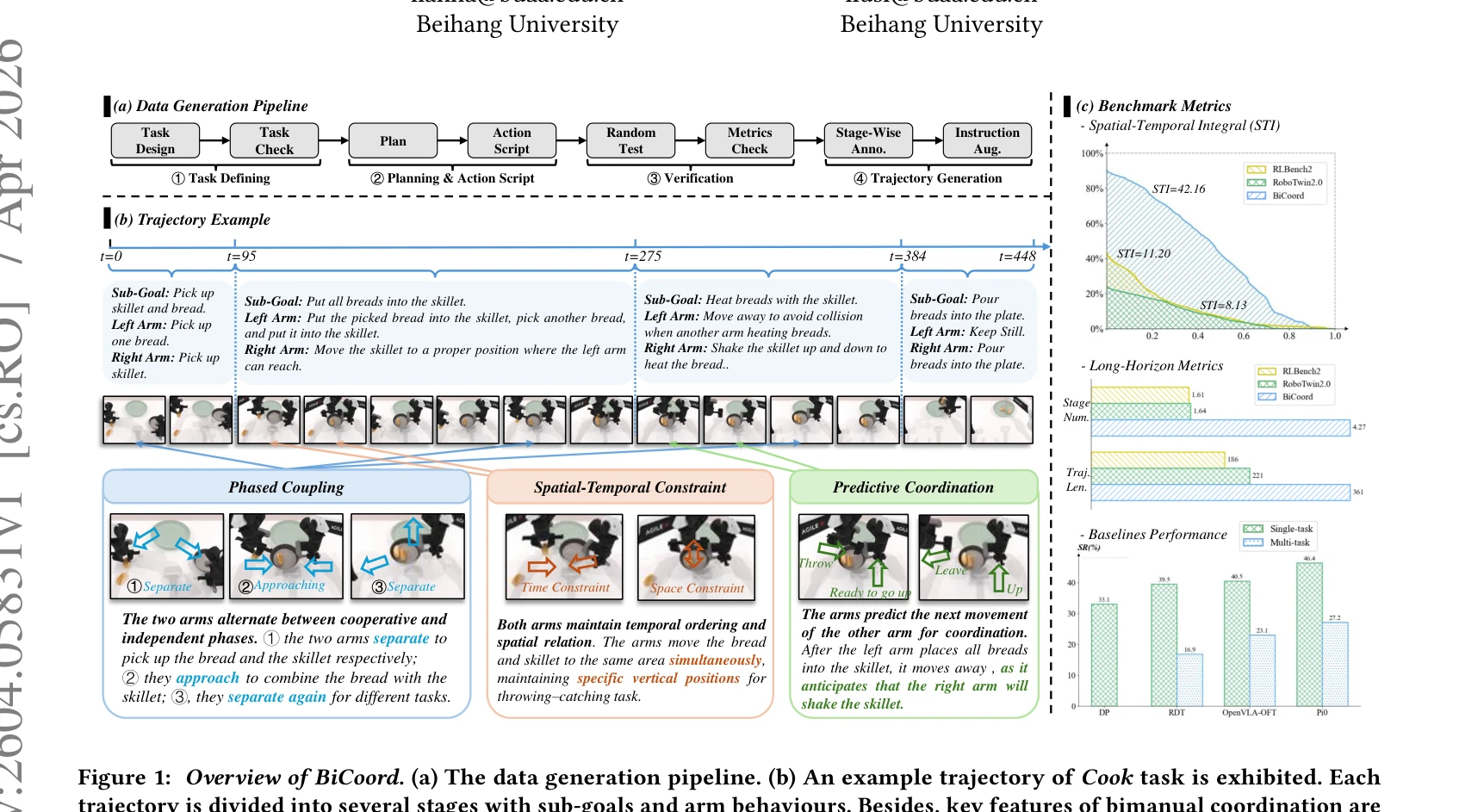
Figure 1: Overview of BiCoord. (a) The data generation pipeline. (b) An example trajectory of Cook task is exhibited. Ea
본 논문은 장시간의 강한 시공간 협응을 요구하는 양팔 조작 작업을 평가하기 위한 BiCoord 벤치마크를 제시한다. 기존 벤치마크의 단기 및 약결합 작업의 한계를 극복하고자 phased coupling, spatial-temporal constraint, predictive coordination 특성을 반영한 과제를 설계했으며, 시간적·공간적·시공간 복합 메트릭을 제안한다.