Essence
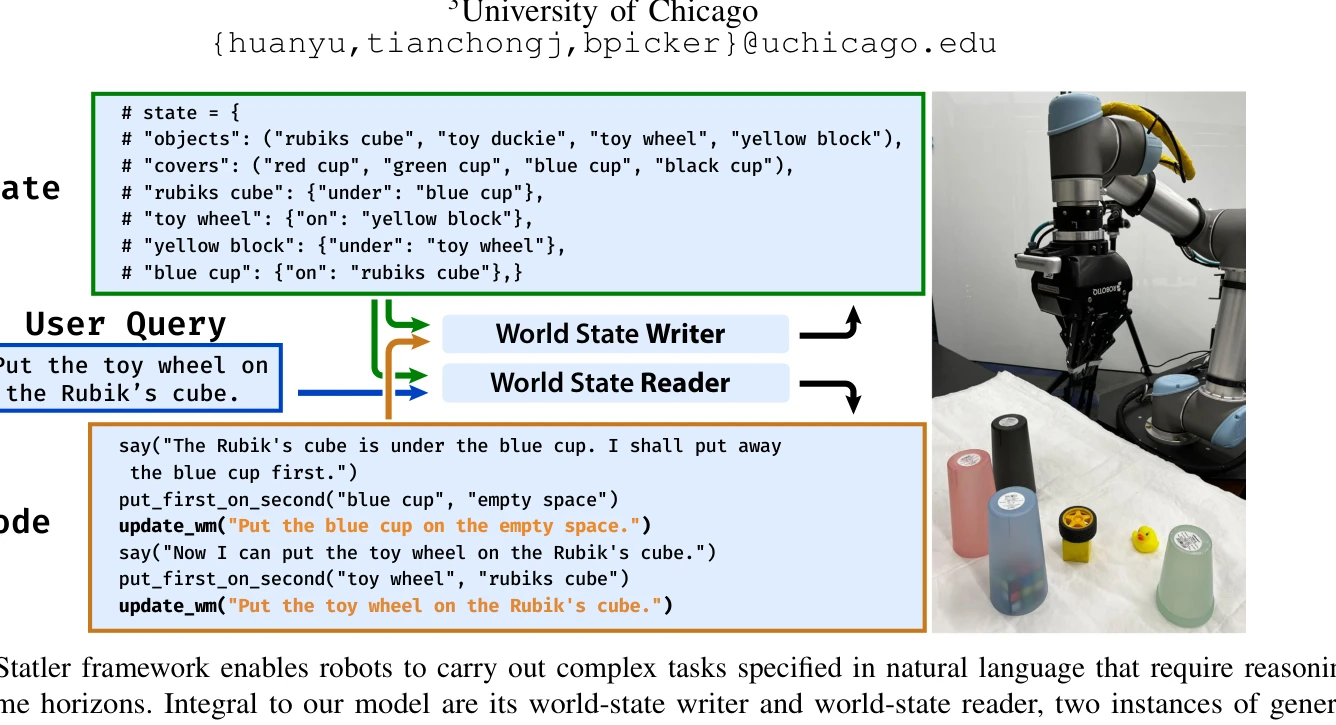
Fig. 1: Our Statler framework enables robots to carry out complex tasks specified in natural language that require reaso
Statler는 로봇 계획 작업에서 LLM이 세계 상태를 명시적으로 유지하고 추적하도록 하는 모델 기반 프레임워크로, 상태 기반 의사결정을 통해 장기 계획 능력을 향상시킨다.
저자: Takuma Yoneda, Jiading Fang, Peng Li, Huanyu Zhang, Tianchong Jiang, Shengjie Lin, Ben Picker, David Yunis, Hongyuan Mei, Matthew R. Walter | 날짜: 2023-06-30 | URL: https://arxiv.org/abs/2306.17840 📄 PDF
Fig. 1: Our Statler framework enables robots to carry out complex tasks specified in natural language that require reaso
Statler는 로봇 계획 작업에서 LLM이 세계 상태를 명시적으로 유지하고 추적하도록 하는 모델 기반 프레임워크로, 상태 기반 의사결정을 통해 장기 계획 능력을 향상시킨다.
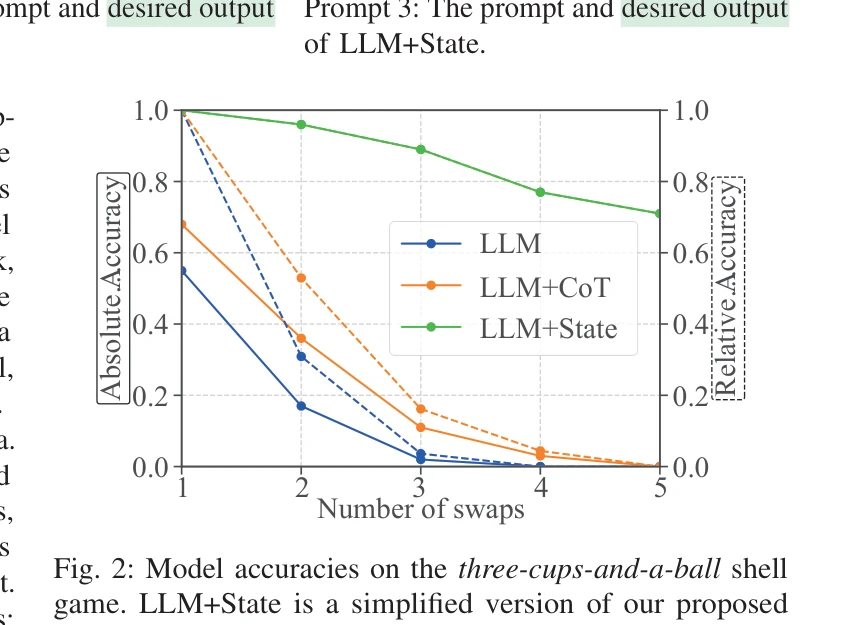
Fig. 2: Model accuracies on the three-cups-and-a-ball shell
Fig. 1: Our Statler framework enables robots to carry out complex tasks specified in natural language that require reaso
총평: Statler는 LLM 기반 로봇 계획에 모델 기반 접근을 도입한 참신한 프레임워크로, 간단하면서도 효과적인 설계로 장기 계획 문제에서 강력한 성능 향상을 보여준다. 다만 실제 로봇 환경에서의 검증과 복잡 도메인 적응성에 대한 추가 연구가 필요하다.