Essence
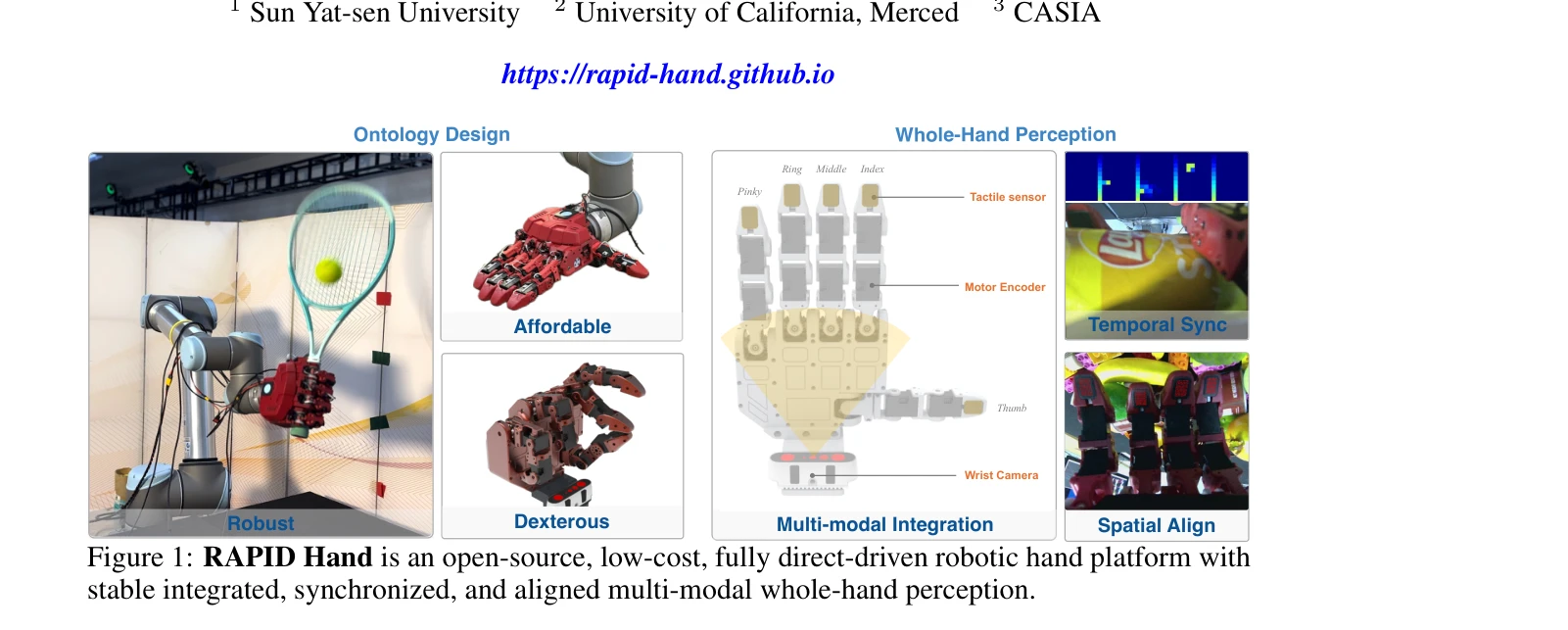
Figure 1: RAPID Hand is an open-source, low-cost, fully direct-driven robotic hand platform with
RAPID Hand는 저비용의 20-DoF 다지형 로봇 손으로, 시각, 촉각, 고유감각을 통합한 멀티모달 인지 시스템과 고-DoF 원격조종 인터페이스를 함께 설계하여 로봇 자율성을 위한 고품질 조작 데이터 수집을 가능하게 한다.
저자: Zhaoliang Wan, Zetong Bi, Zida Zhou, Hao Ren, Yiming Zeng, Yihan Li, Lu Qi, Xu Yang, Ming-Hsuan Yang, Hui Cheng | 날짜: 2025-06-09 | URL: https://arxiv.org/abs/2506.07490 📄 PDF
Figure 1: RAPID Hand is an open-source, low-cost, fully direct-driven robotic hand platform with
RAPID Hand는 저비용의 20-DoF 다지형 로봇 손으로, 시각, 촉각, 고유감각을 통합한 멀티모달 인지 시스템과 고-DoF 원격조종 인터페이스를 함께 설계하여 로봇 자율성을 위한 고품질 조작 데이터 수집을 가능하게 한다.
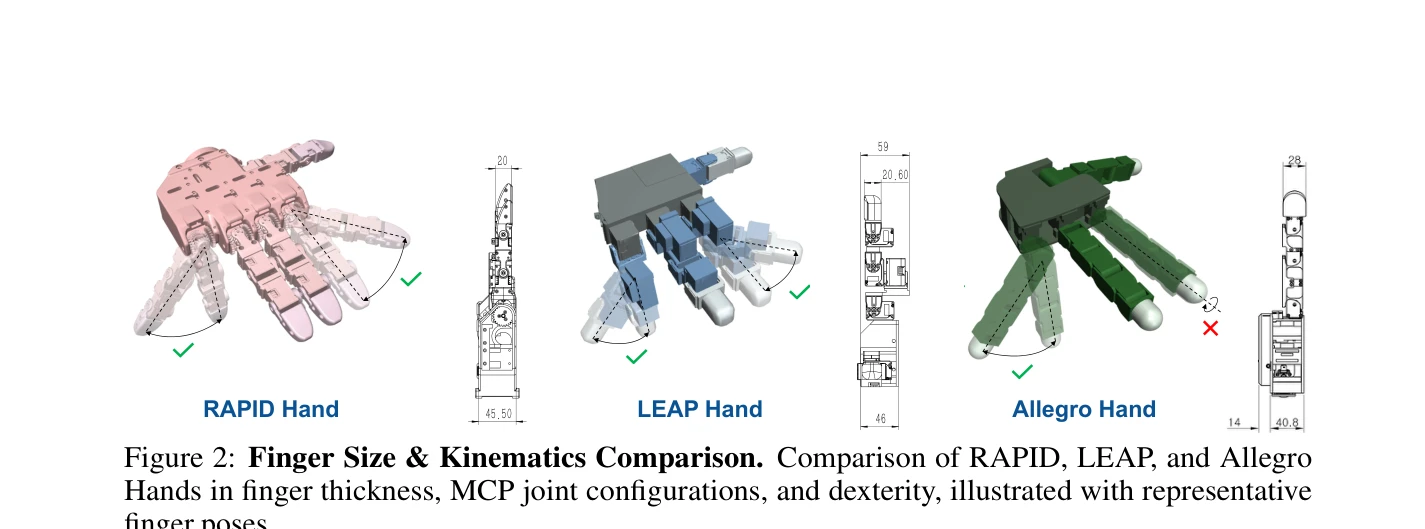
Figure 2: Finger Size & Kinematics Comparison. Comparison of RAPID, LEAP, and Allegro
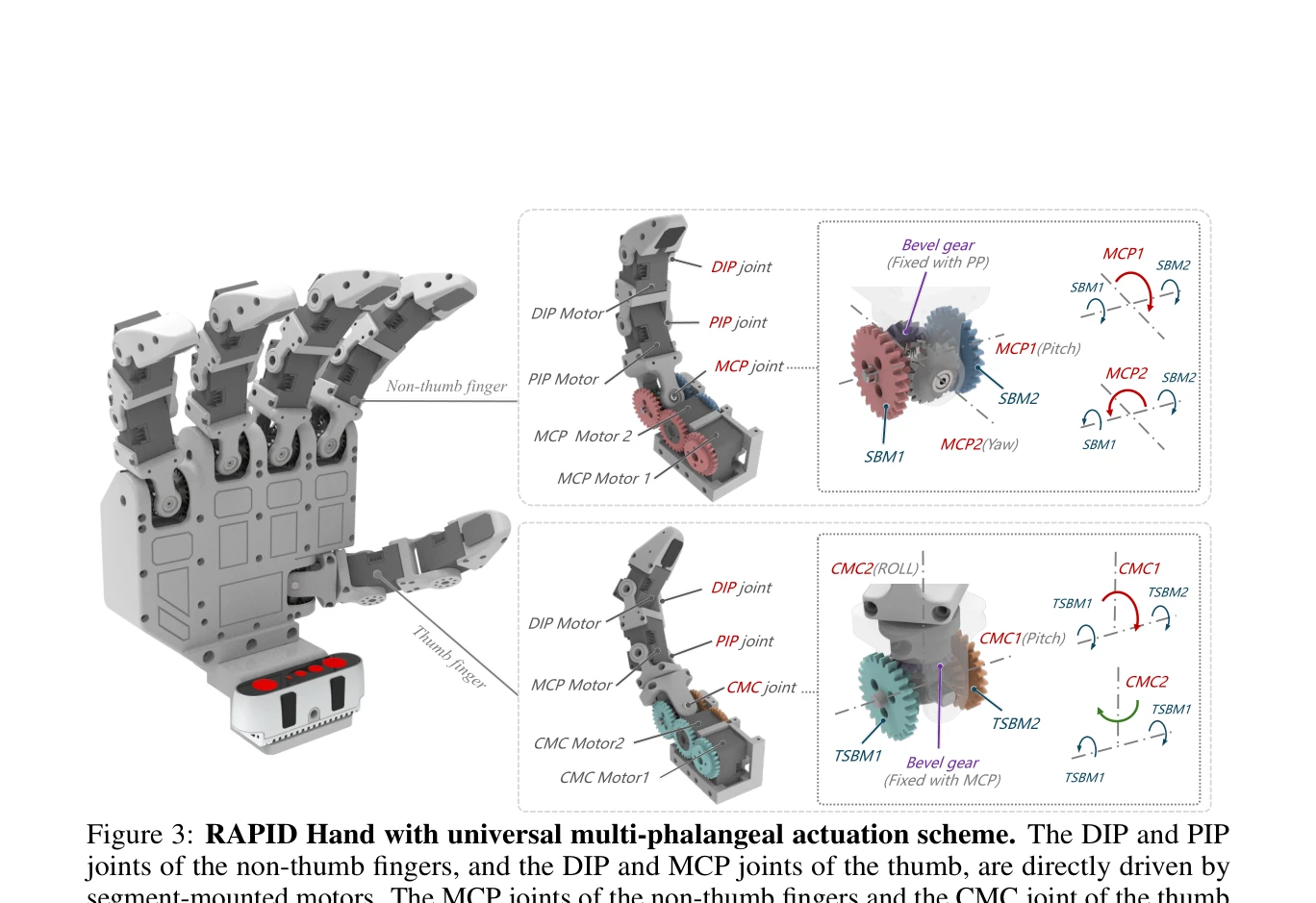
Figure 3: RAPID Hand with universal multi-phalangeal actuation scheme. The DIP and PIP
총평: RAPID Hand는 저비용 다지형 로봇 손 설계, 고정밀 멀티모달 인지 통합, 그리고 효과적인 원격조종 인터페이스를 혁신적으로 통합한 오픈소스 플랫폼으로, 일반화된 로봇 자율성 연구에 필요한 고품질 데이터 수집을 가능하게 하는 중요한 기여이다.