저자: Gu Zhang, Qicheng Xu, Haozhe Zhang, Jianhan Ma, Long He, Yiming Bao, Zeyu Ping, Zhecheng Yuan, Chenhao Lu, Chengbo Yuan, Tianhai Liang, Xiaoyu Tian, Maanping Shao, Feihong Zhang, Mingyu Ding, Yang Gao, Hao Zhao, Hang Zhao, Huazhe Xu | 날짜: 2026-03-23 | URL: https://arxiv.org/abs/2603.22264 📄 PDF
Essence
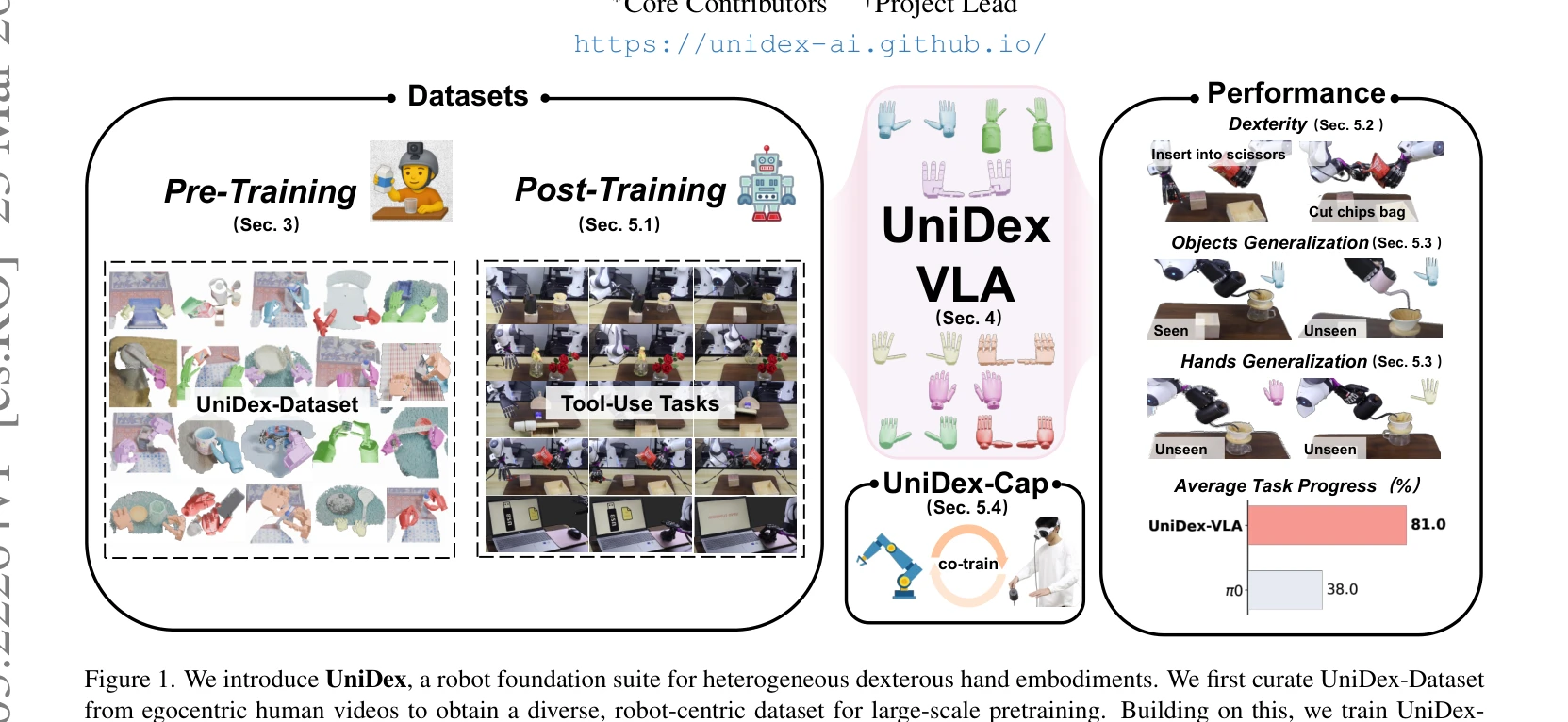
Figure 1. We introduce UniDex, a robot foundation suite for heterogeneous dexterous hand embodiments. We first curate Un
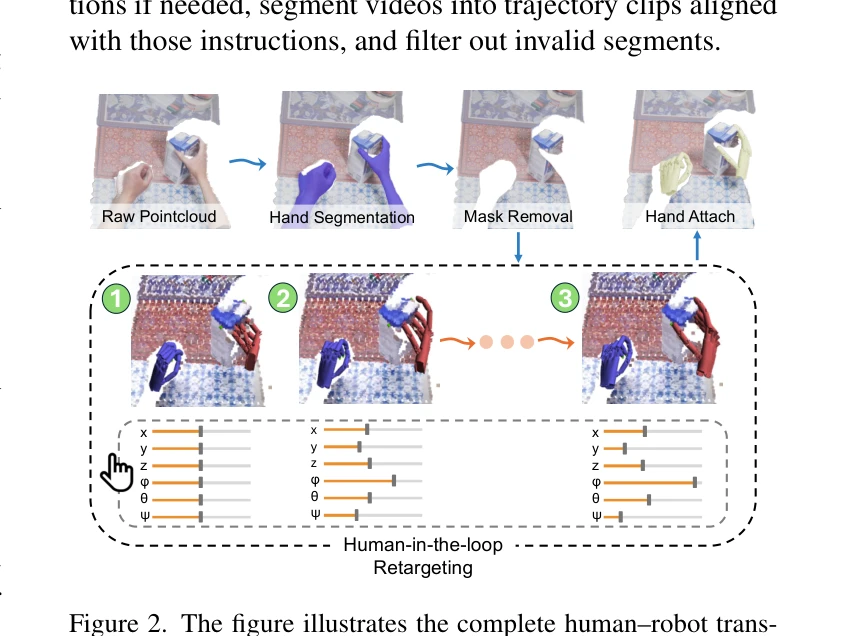
인간 자기중심 비디오로부터 8종 로봇 핸드에 대한 범용 손재주 제어를 위해 50K+ 궤적 데이터셋(UniDex-Dataset), 통합 액션 공간(FAAS), 3D VLA 정책(UniDex-VLA)을 제시하는 로봇 파운데이션 스위트이다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: UniDex는 손재주 로봇 손 제어를 위한 첫 포괄적 파운데이션 스위트로, 대규모 다중 손 데이터셋, 혁신적인 FAAS 액션 공간, 강력한 3D VLA 정책을 통합하여 일반화와 전이 학습에서 뛰어난 성과를 달성했다.