Essence
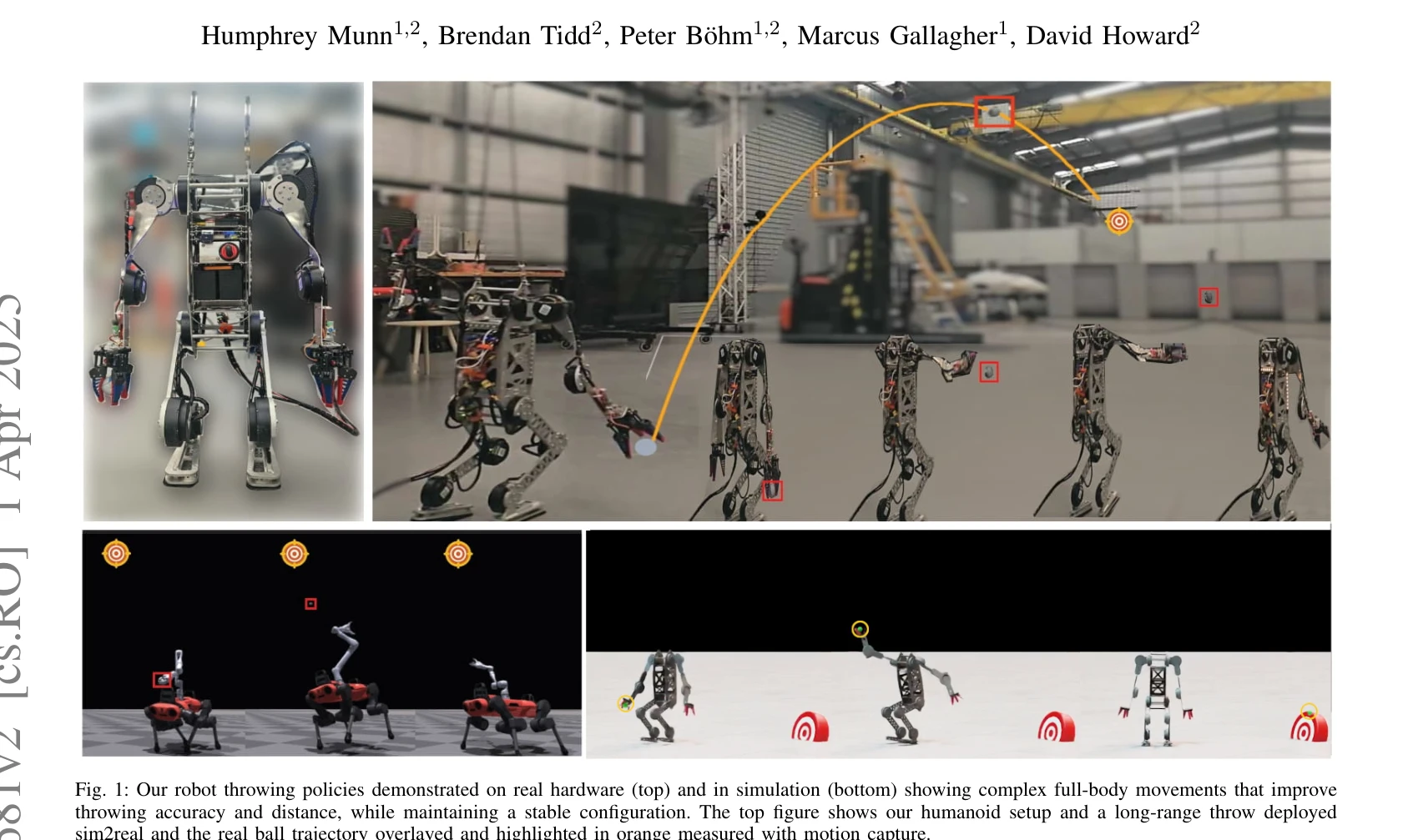
Fig. 1: Our robot throwing policies demonstrated on real hardware (top) and in simulation (bottom) showing complex full-
다리가 있는 로봇의 전신 동역학을 활용하여 강화학습 기반의 3D 목표지점으로의 정확한 투척을 학습하는 방법을 제시하고, 시뮬레이션에서 학습한 정책을 실제 휴머노이드 로봇으로 전이시켰다.
저자: Humphrey Munn, Brendan Tidd, Peter Böhm, Marcus Gallagher, David Howard | 날짜: 2024-10-08 | URL: https://arxiv.org/abs/2410.05681 📄 PDF
Fig. 1: Our robot throwing policies demonstrated on real hardware (top) and in simulation (bottom) showing complex full-
다리가 있는 로봇의 전신 동역학을 활용하여 강화학습 기반의 3D 목표지점으로의 정확한 투척을 학습하는 방법을 제시하고, 시뮬레이션에서 학습한 정책을 실제 휴머노이드 로봇으로 전이시켰다.
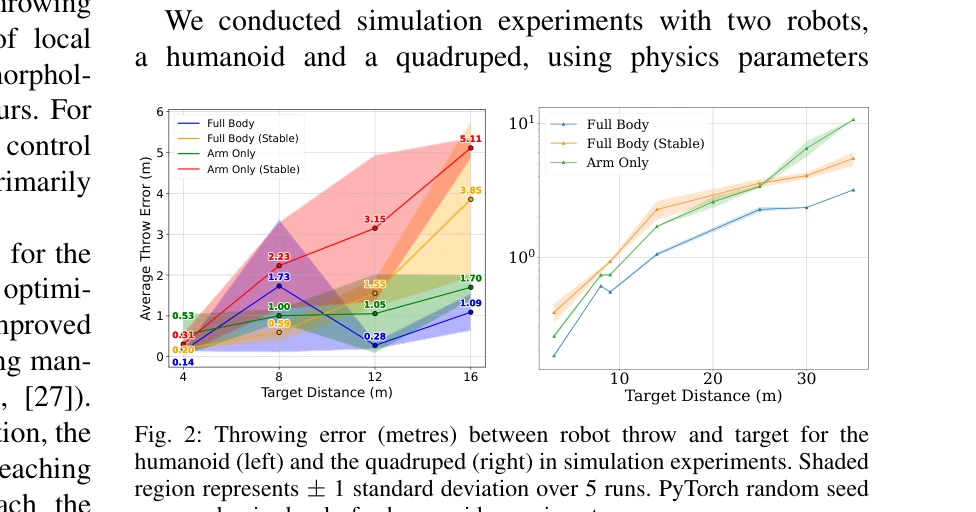
Fig. 2: Throwing error (metres) between robot throw and target for the
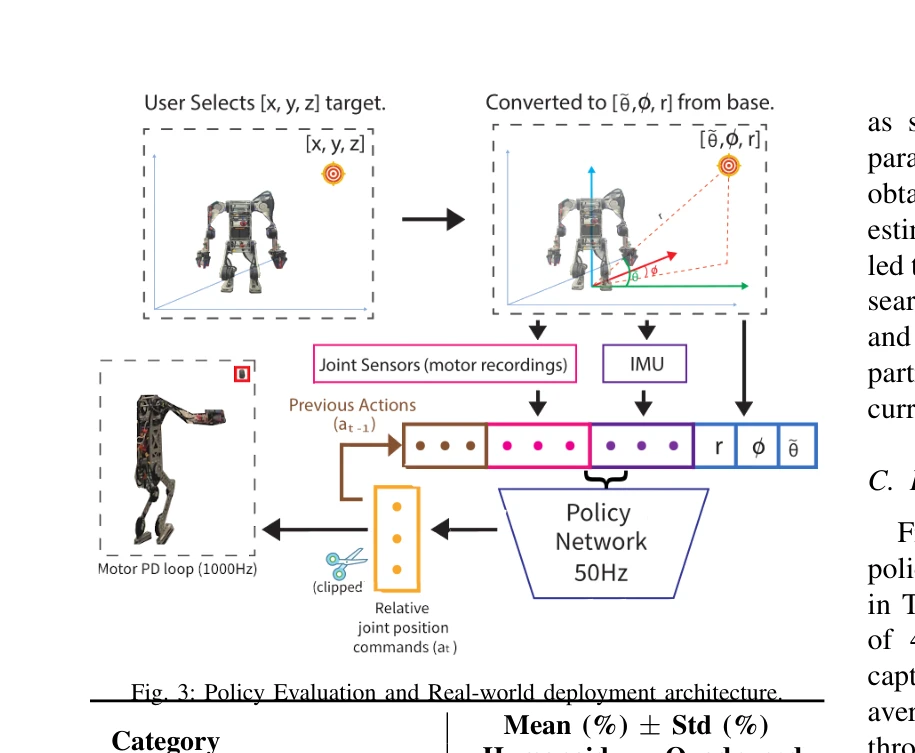
Fig. 3: Policy Evaluation and Real-world deployment architecture.
총평: 본 논문은 전신 동역학을 활용한 3D 임의 목표 투척이라는 명확한 혁신과 적응형 커리큘럼이라는 기술적 기여로 로봇 조작 연구의 새로운 방향을 제시했으나, 실제 로봇 전이의 완전성 부족과 일반화 범위 제약이 실용적 임팩트를 다소 제한한다.