Essence
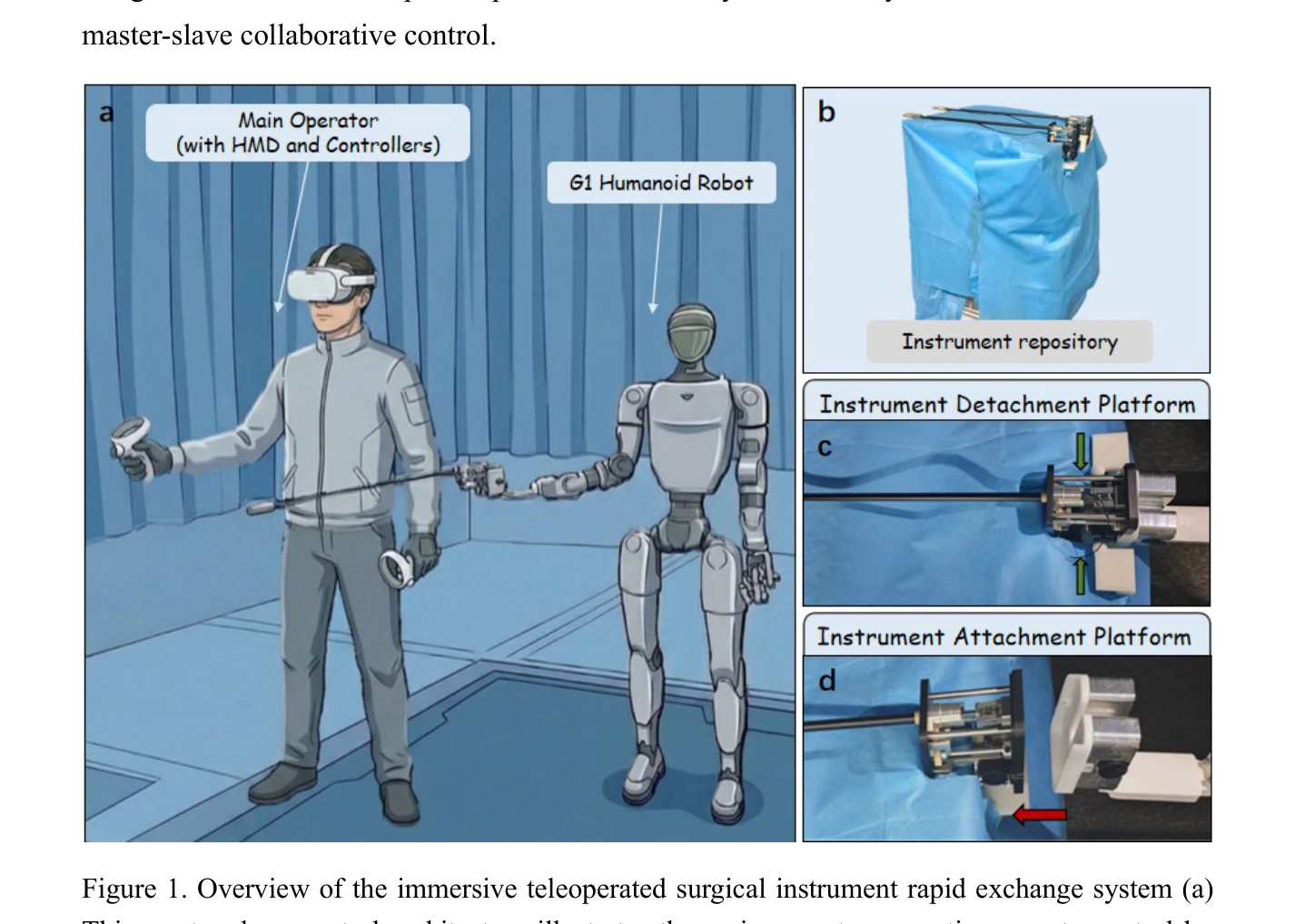
Figure 1. Overview of the immersive teleoperated surgical instrument rapid exchange system (a)
휴머노이드 로봇의 이중 팔 구성을 활용하여 HMD 기반 몰입형 원격조작과 단축 컴플라이언트 도킹 메커니즘을 통합한 최소침습 수술용 고속 기구 교환 시스템을 제안한다.
저자: | 날짜: 2026-04-03 | URL: https://arxiv.org/abs/2604.02707 📄 PDF
Figure 1. Overview of the immersive teleoperated surgical instrument rapid exchange system (a)
휴머노이드 로봇의 이중 팔 구성을 활용하여 HMD 기반 몰입형 원격조작과 단축 컴플라이언트 도킹 메커니즘을 통합한 최소침습 수술용 고속 기구 교환 시스템을 제안한다.
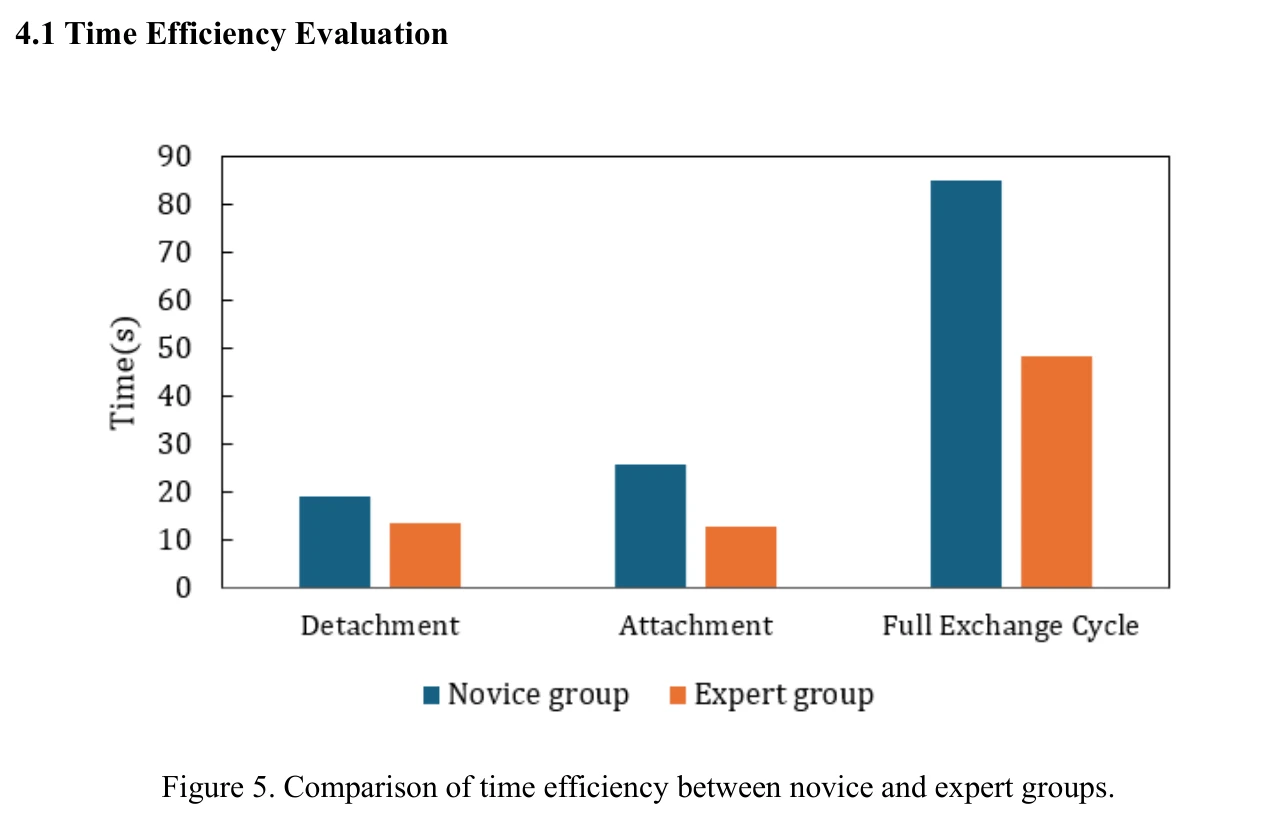
Figure 5. Comparison of time efficiency between novice and expert groups.
총평: 휴머노이드 로봇을 최소침습 수술에 실질적으로 적용하기 위한 핵심 기술 과제를 체계적으로 해결하였으며, HMD 기반 몰입형 원격조작과 맞춤형 도킹 메커니즘의 통합이 효과적임을 입증한 중요한 연구이다.