Essence
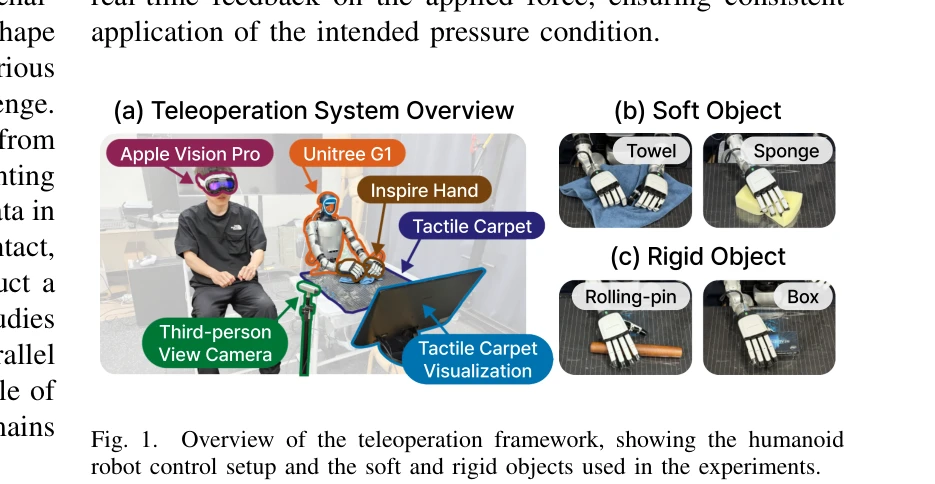
Fig. 1.
인형로봇의 시각-촉각-행동 다중모달 데이터셋을 제시하여 접촉 기반 조작, 특히 부드러운 물체 조작을 위한 로봇 학습을 지원한다.
저자: Eunju Kwon, Seungwon Oh, In-Chang Baek, Yucheon Park, Gyungbo Kim, JaeYoung Moon, Yunho Choi, Kyung-Joong Kim | 날짜: 2025-10-28 | URL: https://arxiv.org/abs/2510.25725 📄 PDF
Fig. 1.
인형로봇의 시각-촉각-행동 다중모달 데이터셋을 제시하여 접촉 기반 조작, 특히 부드러운 물체 조작을 위한 로봇 학습을 지원한다.
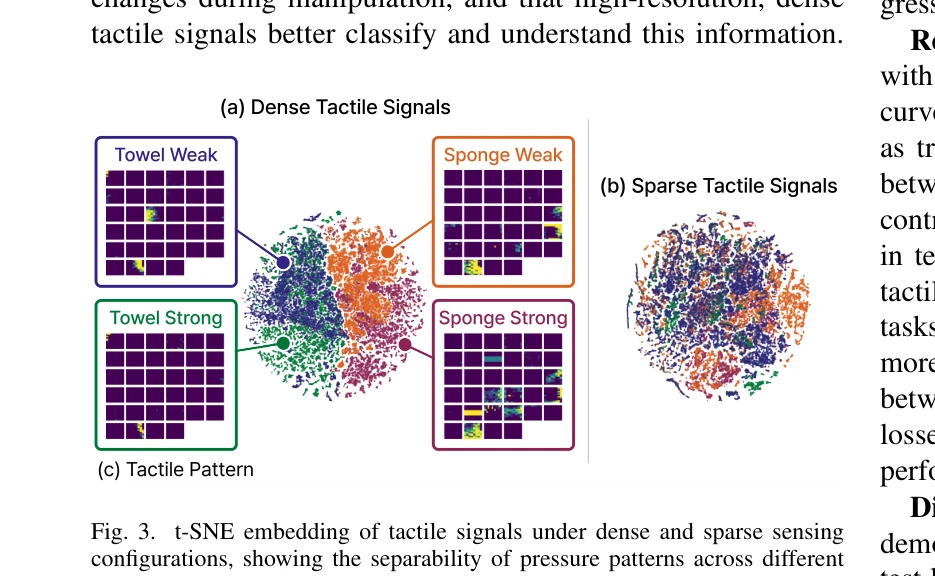
Fig. 3(a) visualizes the tactile signals collected across the four
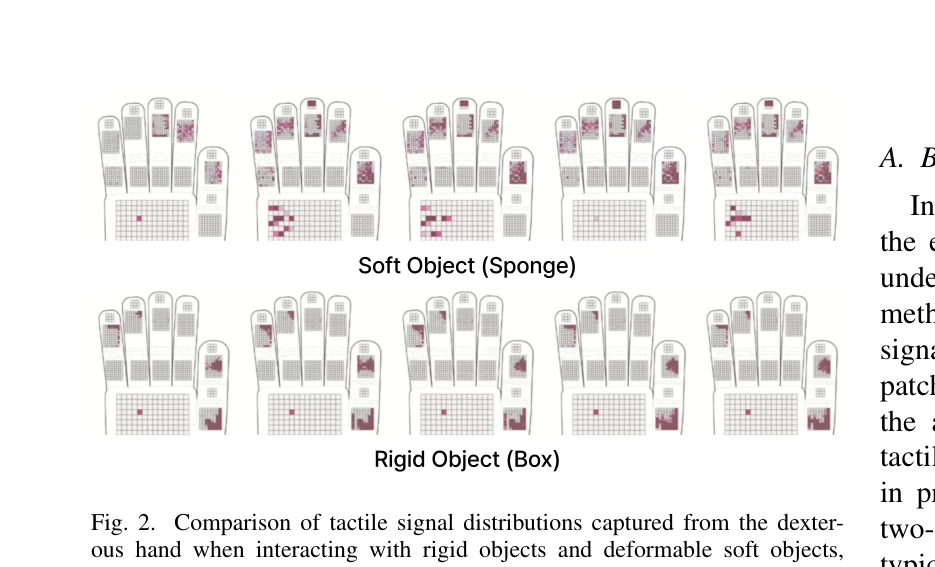
Fig. 2. Comparison of tactile signal distributions captured from the dexter-
총평: 본 논문은 접촉 기반 조작 연구의 중요한 격차를 메우기 위해 인형로봇 기반의 고밀도 시각-촉각-행동 데이터셋을 처음으로 제시하며, 고해상도 촉각 신호의 필요성을 명확하게 입증하는 가치 있는 기여다.