Achievement
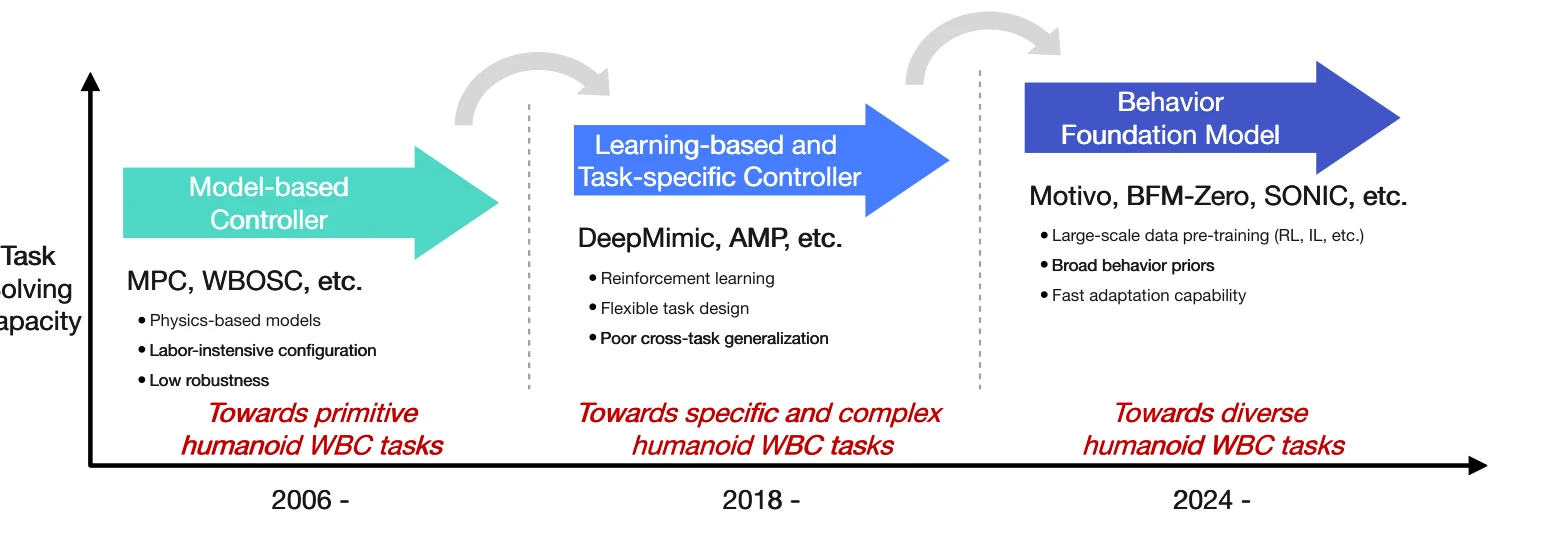
Fig. 2. Evolution map of the whole-body controller for humanoid robots.
- 포괄적 진화 지도: 모델 기반 → 학습 기반 → BFM으로 진행하는 휴머노이드 WBC 제어의 역사적 발전 과정을 시각화하고 각 패러다임의 장단점을 분석
- BFM 정의 확장: Foundation model의 원리를 로봇 제어에 적용하여 vision-language-action(VLA) 모델을 통합하는 다중모달 행동 기초 모델 개념 정립
- 다양한 사전학습 파이프라인 추적: 데모, 상호작용, 시뮬레이션, 합성 등 다양한 데이터 소스와 RL/IL 기반 사전학습 방식의 동향 분석
- 실세계 응용 및 도전 과제 논의: BFM의 실제 적용 사례, 현재 제한사항, 긴급 과제, 향후 기회를 체계적으로 정리