Essence
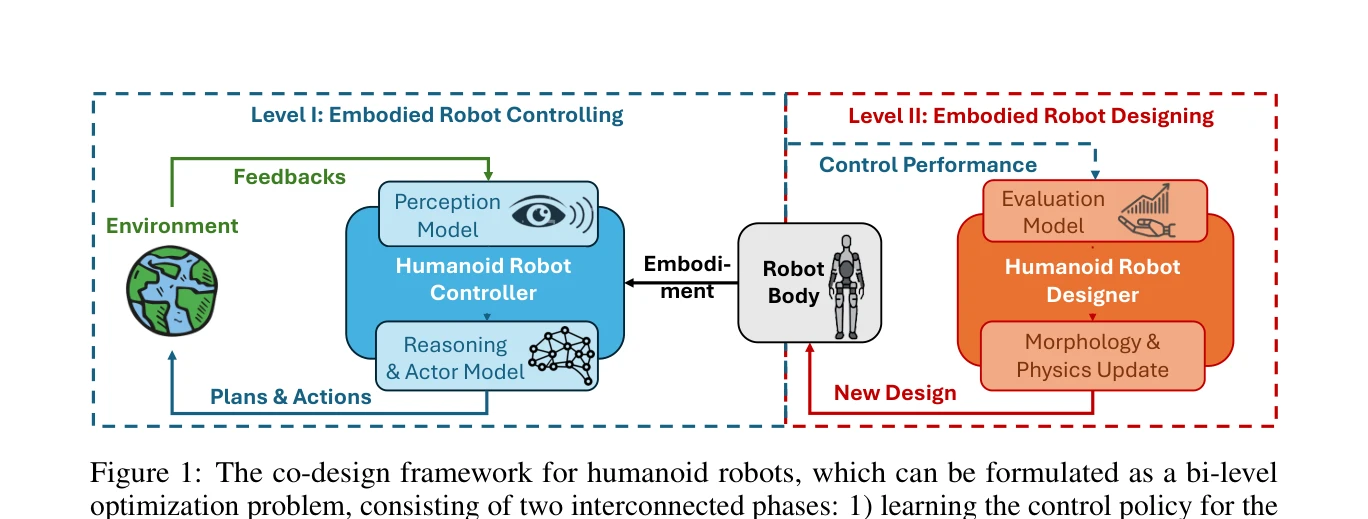
Figure 1: The co-design framework for humanoid robots, which can be formulated as a bi-level
인간형 로봇의 제어 정책과 물리적 구조를 동시에 진화시키는 co-design 메커니즘을 제안하며, 이를 bi-level 최적화 문제로 공식화하여 embodied intelligence 달성의 필수 요소임을 주장하는 위치 논문이다.
저자: Guiliang Liu, Bo Yue, Yi Jin Kim, Kui Jia | 날짜: 2025-10-03 | URL: https://arxiv.org/abs/2510.03081 📄 PDF
Figure 1: The co-design framework for humanoid robots, which can be formulated as a bi-level
인간형 로봇의 제어 정책과 물리적 구조를 동시에 진화시키는 co-design 메커니즘을 제안하며, 이를 bi-level 최적화 문제로 공식화하여 embodied intelligence 달성의 필수 요소임을 주장하는 위치 논문이다.
Figure 1: The co-design framework for humanoid robots, which can be formulated as a bi-level
Figure 1: The co-design framework for humanoid robots, which can be formulated as a bi-level
총평: 본 논문은 인간형 로봇의 embodied intelligence 달성을 위해 co-design의 필수성을 체계적으로 주장하고 실행 가능한 방법론을 제시하는 영향력 있는 위치 논문이다. 다만 구체적인 실험 검증과 정량적 성능 평가를 통한 후속 연구로 보강될 필요가 있다.