How
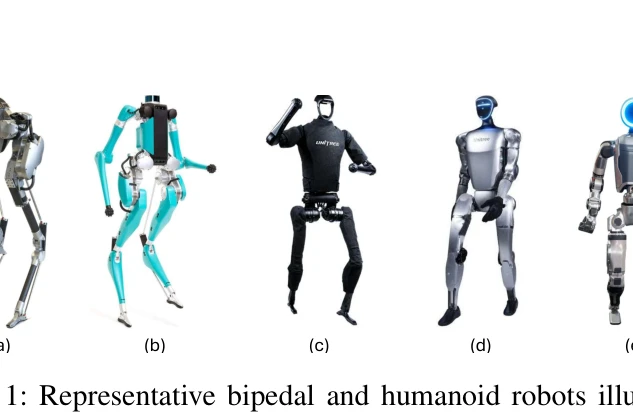
Fig. 1: Representative bipedal and humanoid robots illustrat-
- 2018-2024년 최근 5년간의 문헌을 Google Scholar, IEEE Xplore, Web of Science, arXiv, CoRL, RSS, ICRA, IROS, Humanoids 등으로부터 체계적으로 검색 및 선별
- Deep Reinforcement Learning" 또는 "Reinforcement Learning"과 "Bipedal Locomotion", "Bipedal Walking", "Humanoid Robot", "Legged Robot" 등의 키워드 조합으로 검색
- 선정 기준: (1) Bipedal robot 특정 DRL framework 연구, (2) 시뮬레이션 및 물리적 robot 관련 연구, (3) Sim-to-real transfer 개선 연구, (4) 신뢰성 있는 데이터베이스 및 주요 학회 출판물
- 각 프레임워크의 composition, strengths, limitations, capabilities를 end-to-end(learning approach 기반) 및 hierarchical(layered structure 기반)로 평가
- 참고 로봇 플랫폼: Cassie, Digit, H1, G1, Atlas 등 diverse morphologies와 actuator 특성을 통한 cross-platform 분석