Essence
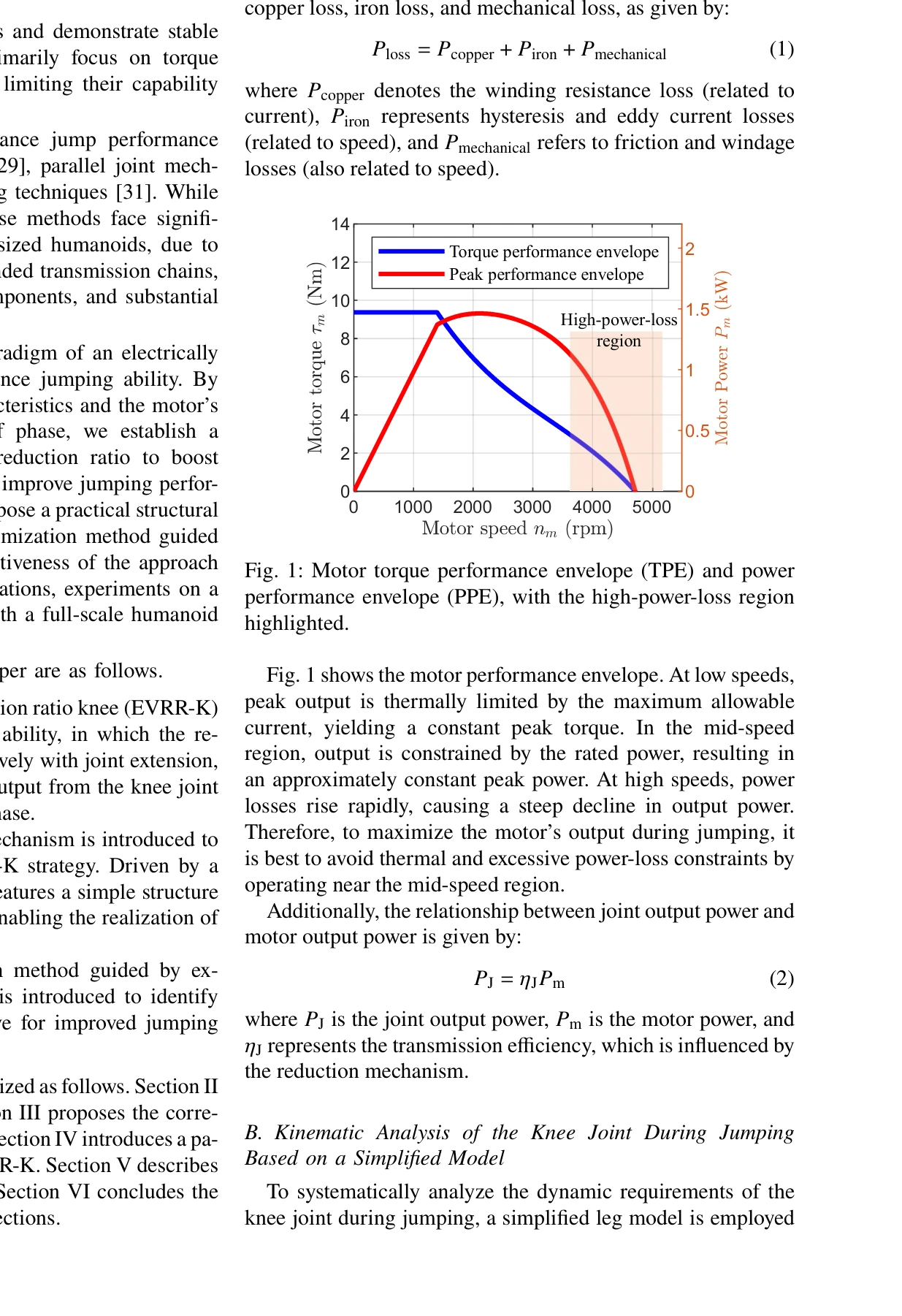
Fig. 1: Motor torque performance envelope (TPE) and power
휴머노이드 로봇의 점프 능력을 향상시키기 위해 무릎 관절이 신장할수록 감속비가 동적으로 감소하는 EVRR-K(Explosive Variable Reduction Ratio Knee) 설계 패러다임을 제안한다.
저자: Xiaoshuai Ma, Haoxiang Qi, Qingqing Li, Haochen Xu, Xuechao Chen, Junyao Gao, Zhangguo Yu, Qiang Huang | 날짜: 2025-06-14 | URL: https://arxiv.org/abs/2506.12314 📄 PDF
Fig. 1: Motor torque performance envelope (TPE) and power
휴머노이드 로봇의 점프 능력을 향상시키기 위해 무릎 관절이 신장할수록 감속비가 동적으로 감소하는 EVRR-K(Explosive Variable Reduction Ratio Knee) 설계 패러다임을 제안한다.
총평: 무릎 관절의 동적 감속비 개념을 신창의적으로 도입하여 전기 구동 휴머노이드의 점프 성능을 획기적으로 개선한 우수한 연구다. 이론 분석, 메커니즘 설계, 실험 검증이 체계적으로 이루어져 있으며, 달성한 점프 성능(0.5m 수직, 1.1m 수평)은 기존 전기 로봇 대비 최고 수준이다.