Essence
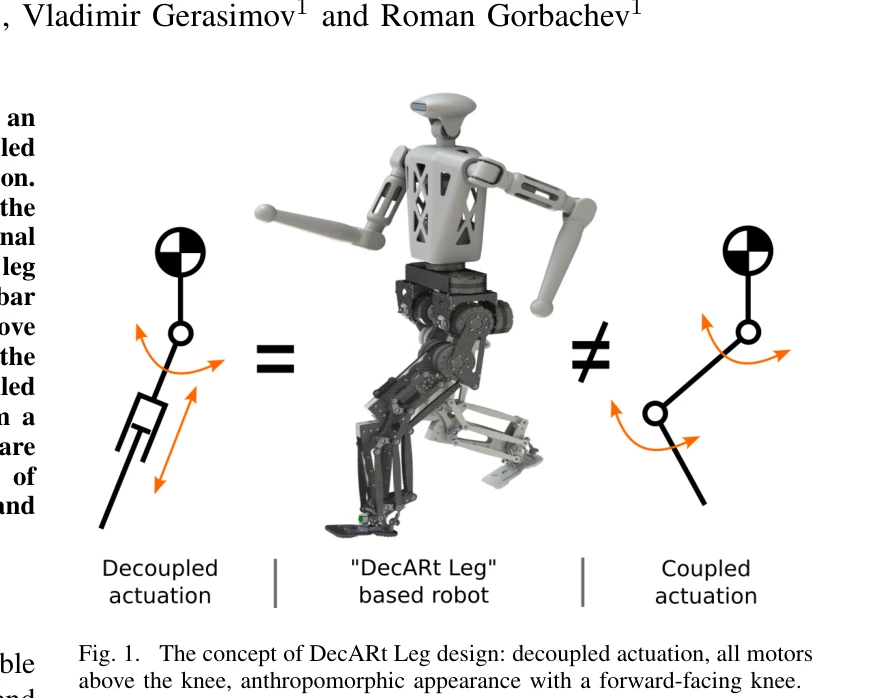
Fig. 1. The concept of DecARt Leg design: decoupled actuation, all motors
본 논문은 decoupled actuation을 활용하면서도 인간형 다리의 외형을 유지하는 DecARt Leg을 제안하며, FAST(Fastest Achievable Swing Time) 메트릭을 통해 agile locomotion 능력을 평가한다.
저자: Egor Davydenko, Andrei Volchenkov, Vladimir Gerasimov, Roman Gorbachev | 날짜: 2025-11-13 | URL: https://arxiv.org/abs/2511.10021 📄 PDF
Fig. 1. The concept of DecARt Leg design: decoupled actuation, all motors
본 논문은 decoupled actuation을 활용하면서도 인간형 다리의 외형을 유지하는 DecARt Leg을 제안하며, FAST(Fastest Achievable Swing Time) 메트릭을 통해 agile locomotion 능력을 평가한다.
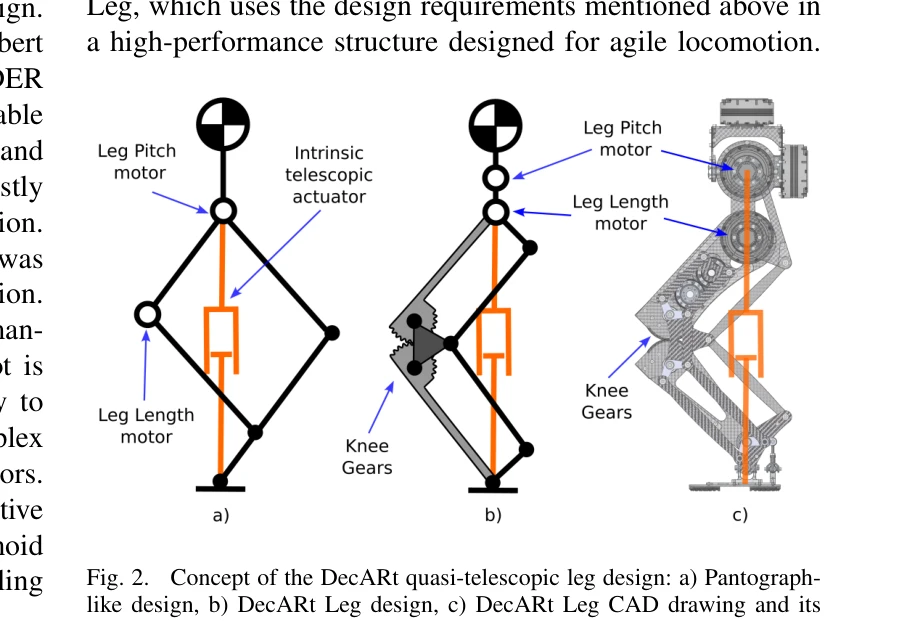
Fig. 2.
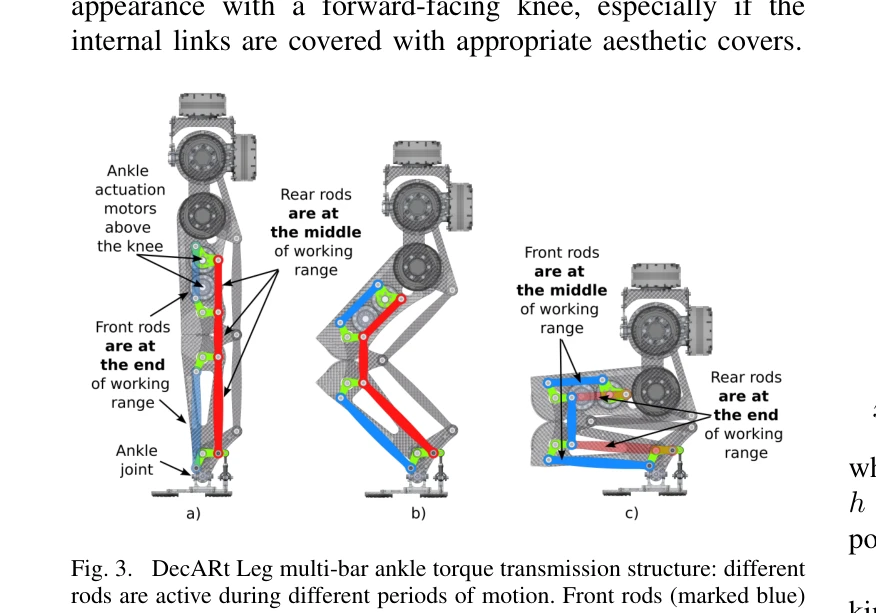
Fig. 3. DecARt Leg multi-bar ankle torque transmission structure: different
총평: 본 논문은 humanoid robotics의 오랜 설계 갈등(efficiency vs. human-like appearance)을 새로운 kinematic approach로 해결하려는 의미 있는 시도이며, FAST 메트릭 제안과 함께 충분한 설계 혁신성을 보여준다. 다만 preliminary hardware 수준의 검증에 그쳐 실제 성능 우위를 완전히 입증하지는 못한 한계가 있다.