저자: Yuxuan Wang, Ming Yang, Ziluo Ding, Yu Zhang, Weishuai Zeng, Xinrun Xu, Haobin Jiang, Zongqing Lu | 날짜: 2025-06-15 | URL: https://arxiv.org/abs/2506.12779 📄 PDF
Essence
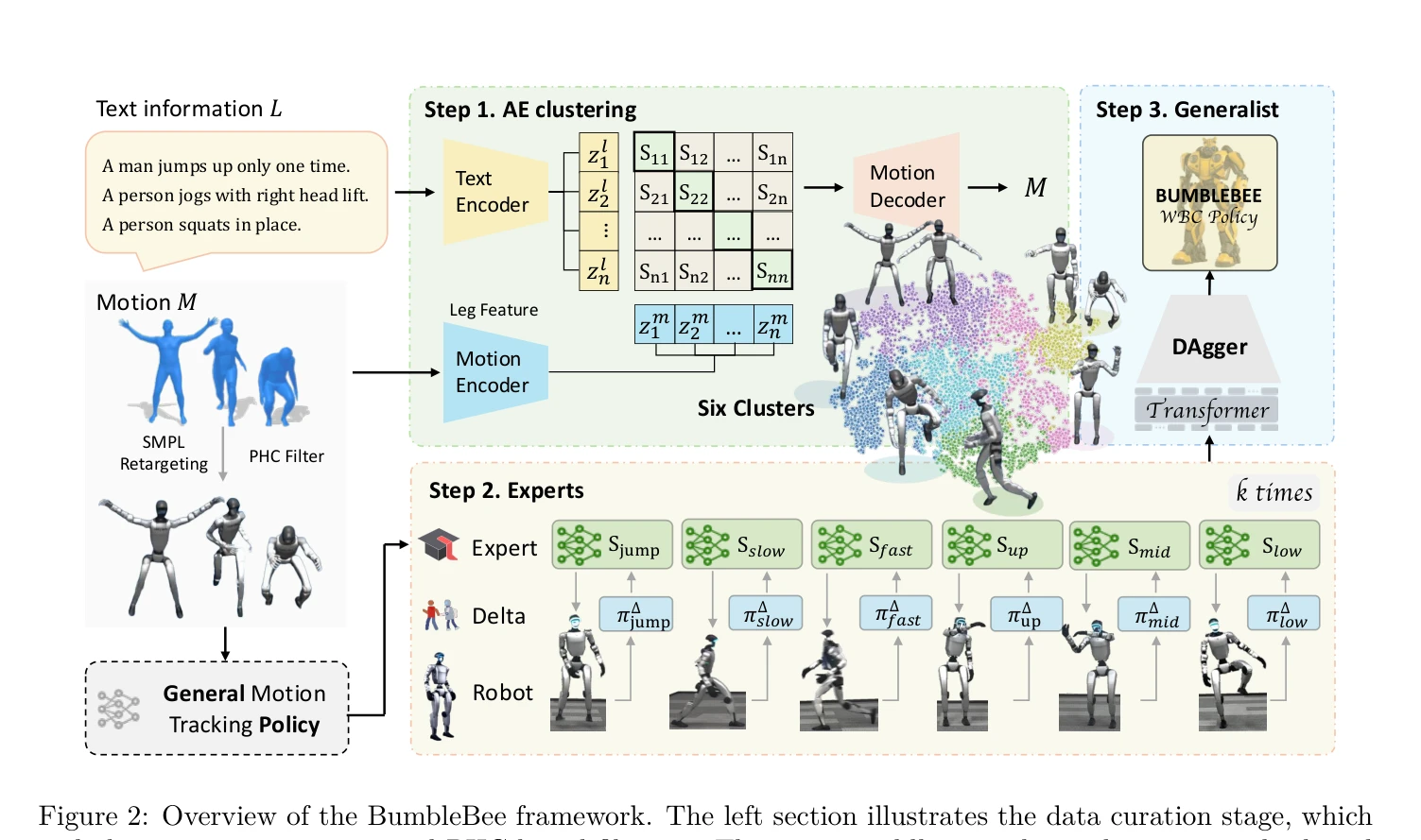
Figure 2: Overview of the BumbleBee framework. The left section illustrates the data curation stage, which
BumbleBee는 motion clustering과 sim-to-real adaptation을 결합하여 humanoid robot의 일반적인 whole-body control을 달성하는 expert-generalist 학습 프레임워크이다. 여러 motion cluster에서 전문가 정책을 훈련한 후 이를 통합 generalist controller로 distill한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: BumbleBee는 motion clustering과 expert-generalist distillation을 통해 humanoid robot의 일반적인 whole-body control 문제를 효과적으로 해결하며, sim-to-real adaptation과 결합하여 실제 세계에서 agile하고 robust한 control을 달성한 우수한 연구이다. 기술적 창의성과 실험적 검증이 뛰어나고 robotics 분야에 의미 있는 기여를 한다.