저자: Yusen Feng, Xiang Wang, Heyuan Yao, Zixi Kang, Xinyu Huo, Boyang Yu, Pengyun Qiu, Ruijie Zhao, Baoquan Chen, Libin Liu | 날짜: 2026 | DOI: 10.48550/ARXIV.2605.24592 📄 PDF
Essence
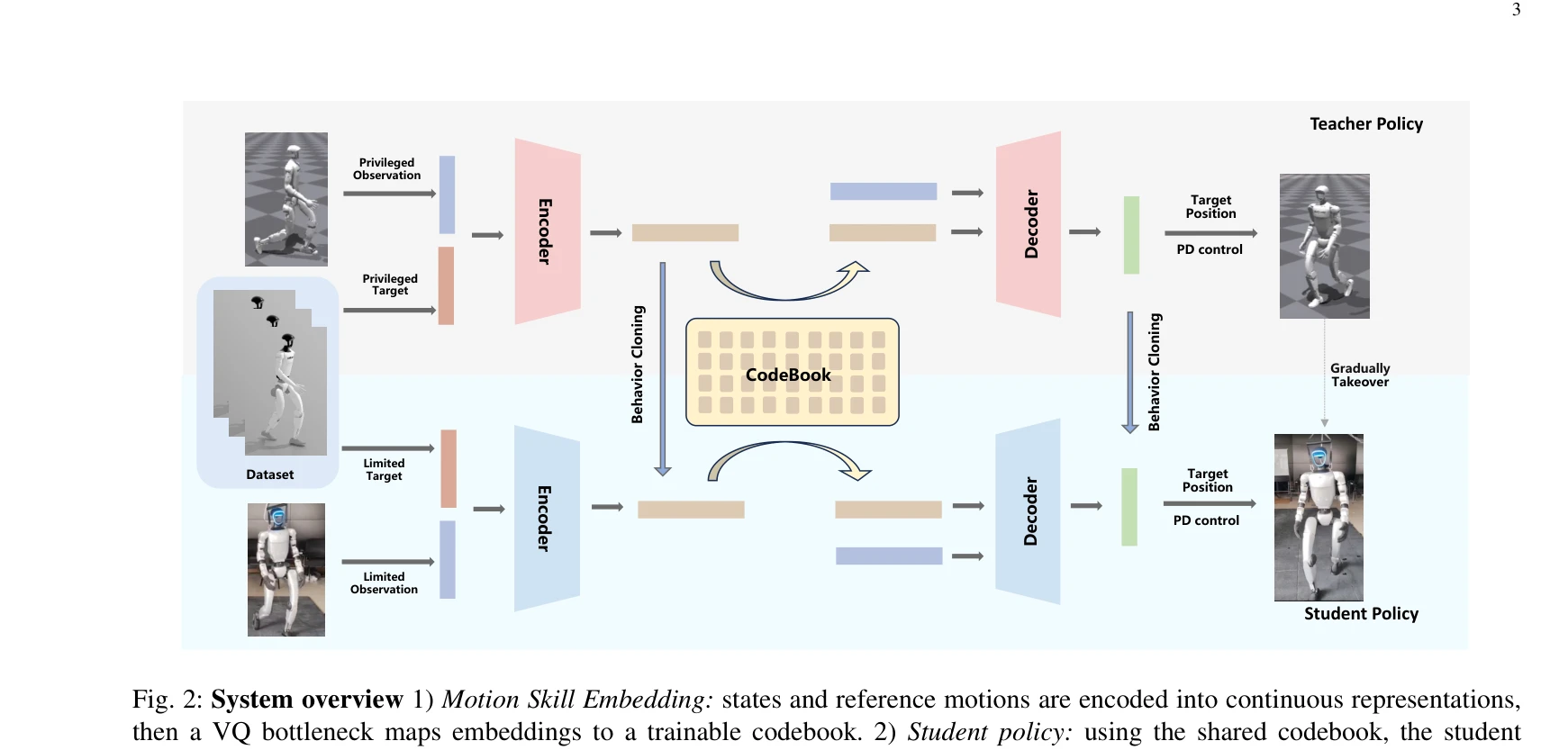
Fig. 2: System overview 1) Motion Skill Embedding: states and reference motions are encoded into continuous representati
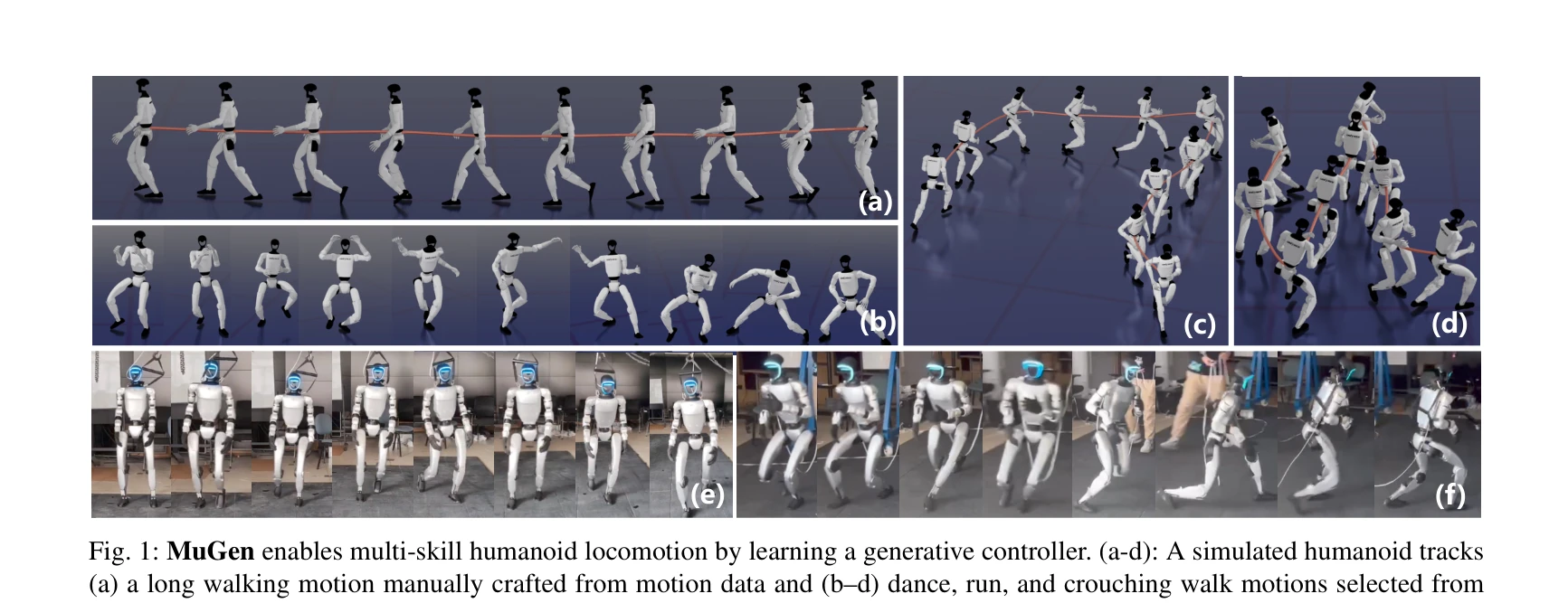
MuGen은 VQ-VAE와 model-based reinforcement learning을 결합하여 인간의 모션 데이터로부터 인형형 로봇의 다중 기술 보행 제어기를 학습하는 데이터 기반 프레임워크이다. Teacher-student learning과 새로운 policy distillation 전략을 통해 시뮬레이션에서 학습한 모션을 실제 로봇에 배포할 수 있게 한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: MuGen은 VQ-VAE, model-based RL, teacher-student learning을 통합하여 인형형 로봇의 다중 기술 보행을 학습하고 배포하는 체계적이고 기술적으로 건전한 접근을 제시한다. 실제 Unitree G1 로봇에서의 검증과 미학습 모션에 대한 강건한 일반화 능력을 보여주었으나, sim-to-real gap의 완전한 해결, 데이터셋 규모/다양성의 상세 분석, 계산 복잡도 평가 등에서 개선이 필요하다. 전반적으로 인형형 로봇 제어 분야에 의미 있는 기여를 한 견실한 연구이다.