Essence
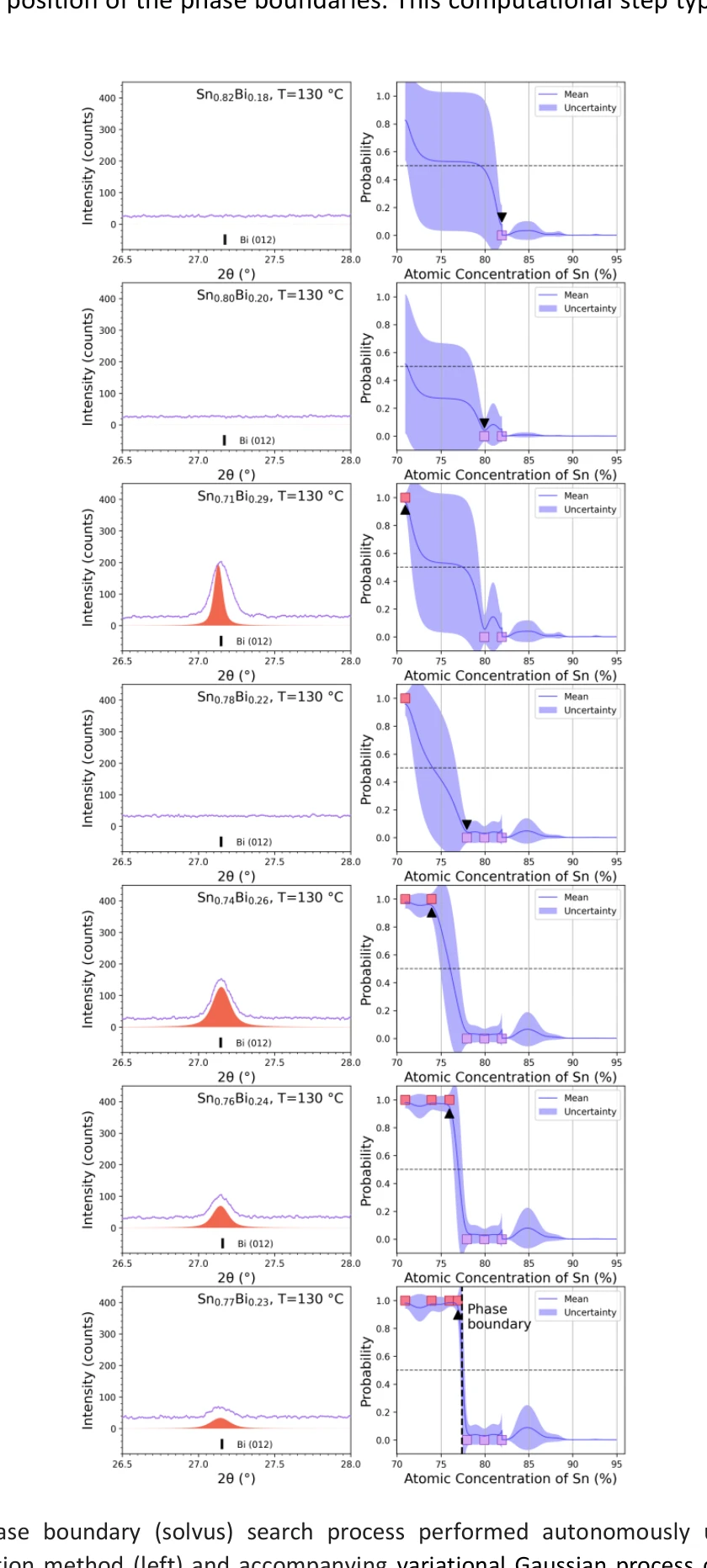
AMASE 시스템이 Sn-Bi 박막 상태도 매핑에 적용되는 개요. (a) 실시간 실험-계산 상호작용, (b) 실험 장치, (c) 조사 대상 상 영역
본 논문은 Autonomous MAterials Search Engine (AMASE)를 통해 실시간으로 실험과 이론을 폐루프 형태로 자동 상호작용시켜 재료 탐색을 수행하는 혁신적 방법론을 제시한다. Sn-Bi 박막 이원 상태도를 단 8시간 만에 매핑하며, 필요한 실험 횟수를 6배 감소시켰다.
같이 보면 좋은 논문
기반 연구
실시간 AI 실험 자동화 프레임워크를 적용하는 데 있어 필요한 데이터 처리, AI-실험 상호작용 원리를 이론적으로 제공합니다.
기반 연구
658의 '자동 실험실' 폐루프는 038의 LLM 기반 에이전트 연구 자동화 비전과 근본적으로 연결된다.
기반 연구
658 논문은 실험-이론 간 실시간 폐쇄 루프 상호작용이 연구 자동화의 핵심임을 강조해, Dolphin의 방법론적 근거를 제공합니다.
기반 연구
AI 가속 소재 발견의 이론적·방법론적 기반을 제공하는 선행 연구이다.
기반 연구
Geometric multigrid 방법론의 이론적 기반을 제공하는 수치해석 연구이다.
기반 연구
자율 소재 개발 패러다임의 이론적·방법론적 기반을 제공하는 선행 연구이다.
다른 접근
둘 다 실험적 재료 합성에서 RL/AI로 합성 조건을 탐색하지만, 140은 오프라인 RL, 658은 실시간 이론-실험 폐루프 자동화를 중심으로 한다.
다른 접근
AMASE 시스템을 활용한 자율 실험-이론 폐루프 재료탐색 사례는 self-driving lab의 다양한 응용 접근법을 보여줍니다.
다른 접근
실험·이론 상호작용의 실시간 클로즈드 루프를 통해 적응적 제어 및 생성적 모델의 실제 제조/과학 적용을 보여줍니다.
다른 접근
재료 과학 분야의 자동화 실험을 다른 AI 접근법으로 구현한 연구이다.
다른 접근
Robot-assisted mapping 논문은 자율 재료 탐색에서 로봇 기반 실험 디자인 및 자동화 사례로, AMASE와 유사하지만 접근 방법이 다릅니다.
다른 접근
Agentic LLM Reasoning in a Self-Driving Laboratory 논문은 대기 오염 입자 분석에서 셀프드라이빙 랩 활용 사례를 제시하여 분야 확장을 보여줍니다.
다른 접근
자율주행 실험실 플랫폼을 위한 유사한 모듈형 하드웨어-소프트웨어 통합 접근법을 취하는 연구이다
다른 접근
자율 실험 장비 제어를 위한 다른 기계학습 기반 접근법을 취하는 연구이다
후속 연구
Self-driving laboratories 논문은 단백질 랜드스케이프 탐색의 자동화 워크플로우로 AMASE의 방법론을 생명과학 실험에 확장한 실례입니다.
후속 연구
HoneyComb는 다양한 재료 탐색 태스크에서 LLM 기반 에이전트 적용 및 자동 실험 제어의 확장된 예시를 제공한다.
후속 연구
자동 실험 및 재료 탐색을 구현하는 폐루프 self-driving lab(화학/재료) 구조를 상세히 연구하며, AMASE와 유사 시스템의 발전 흐름을 보여줍니다.
후속 연구
실험과 이론의 실시간 클로즈드루프 상호작용이라는 관점에서 LLM-GNN 기반 자동실험 최적화(658)와 고에너지 실험에서의 실시간 AI 자동제어(432)는 상호 보완적 사례입니다.
후속 연구
실험-이론 실시간 클로즈드 루프 상호작용 사례를 통해 분자동역학(MD) 데이터 분석 및 응용의 범위를 확장합니다.
후속 연구
실시간 실험-이론 클로즈드 루프 상호작용 기반의 자가 구동 실험 설계로, fix pimd/langevin 기반 시뮬레이션의 실험 연계 사례를 보여줍니다.
응용 사례
An autonomous laboratory 논문은 무기물 합성에 자동화 실험 시스템을 적용하여 AMASE와 유사한 폐루프 접근방식의 실제 적용 사례입니다.