Essence
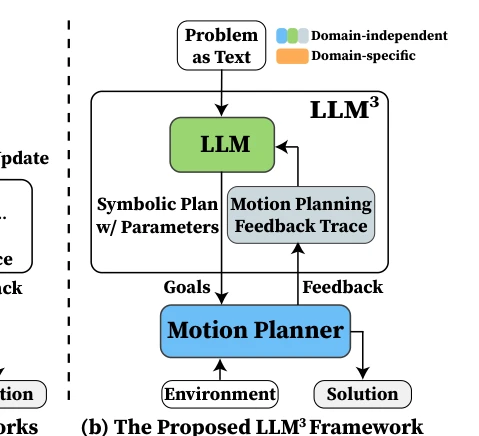
Fig. 1: The proposed LLM3 framework. (a) Traditional TAMP
LLM3는 대규모 언어모델(LLM)을 기반으로 한 Task and Motion Planning 프레임워크로, 모션 계획 실패에 대한 추론을 통해 기호적 계획과 연속 모션 생성을 통합한다. 도메인 특화 인터페이스 대신 LLM의 추론 능력을 활용하여 작업 계획과 행동 매개변수를 제안하고 반복적으로 개선한다.
저자: Shu Wang, Muzhi Han, Ziyuan Jiao, Zeyu Zhang, Ying Nian Wu, Song-Chun Zhu, Hangxin Liu | 날짜: 2024-03-18 | URL: https://arxiv.org/abs/2403.11552 📄 PDF
Fig. 1: The proposed LLM3 framework. (a) Traditional TAMP
LLM3는 대규모 언어모델(LLM)을 기반으로 한 Task and Motion Planning 프레임워크로, 모션 계획 실패에 대한 추론을 통해 기호적 계획과 연속 모션 생성을 통합한다. 도메인 특화 인터페이스 대신 LLM의 추론 능력을 활용하여 작업 계획과 행동 매개변수를 제안하고 반복적으로 개선한다.
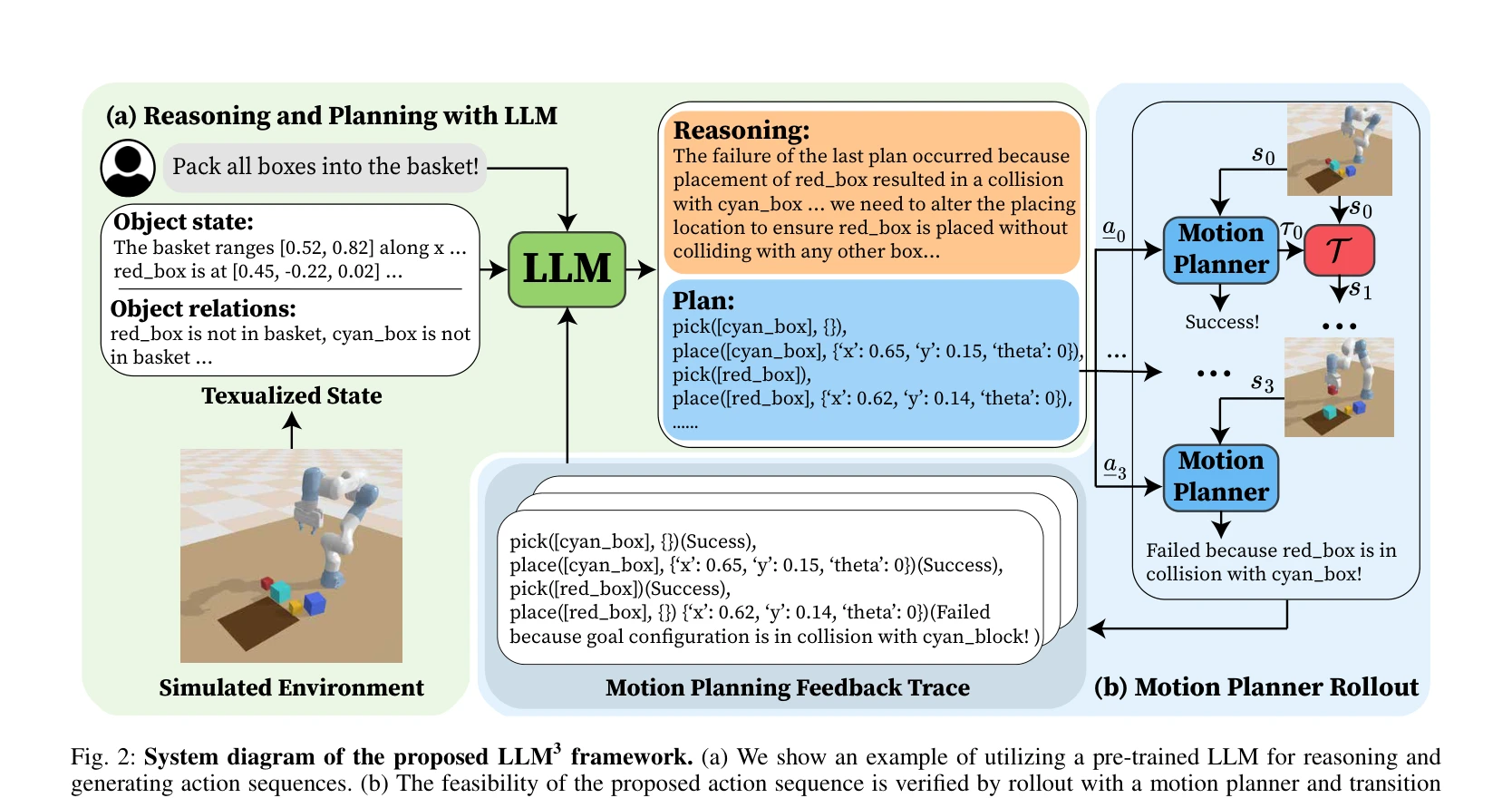
Fig. 2: System diagram of the proposed LLM3 framework. (a) We show an example of utilizing a pre-trained LLM for reasoni
Fig. 2: System diagram of the proposed LLM3 framework. (a) We show an example of utilizing a pre-trained LLM for reasoni
총평: LLM3는 domain-independent interface를 통해 TAMP의 오래된 문제를 창의적으로 해결하며, motion failure reasoning을 LLM 기반 planning에 통합한 점에서 새로운 방향을 제시한다. 다만 평가의 범위가 제한적이고 real-robot 실험의 깊이가 더 필요하지만, 앞으로의 로봇 자율화에 중요한 기초를 제공한다.