Essence
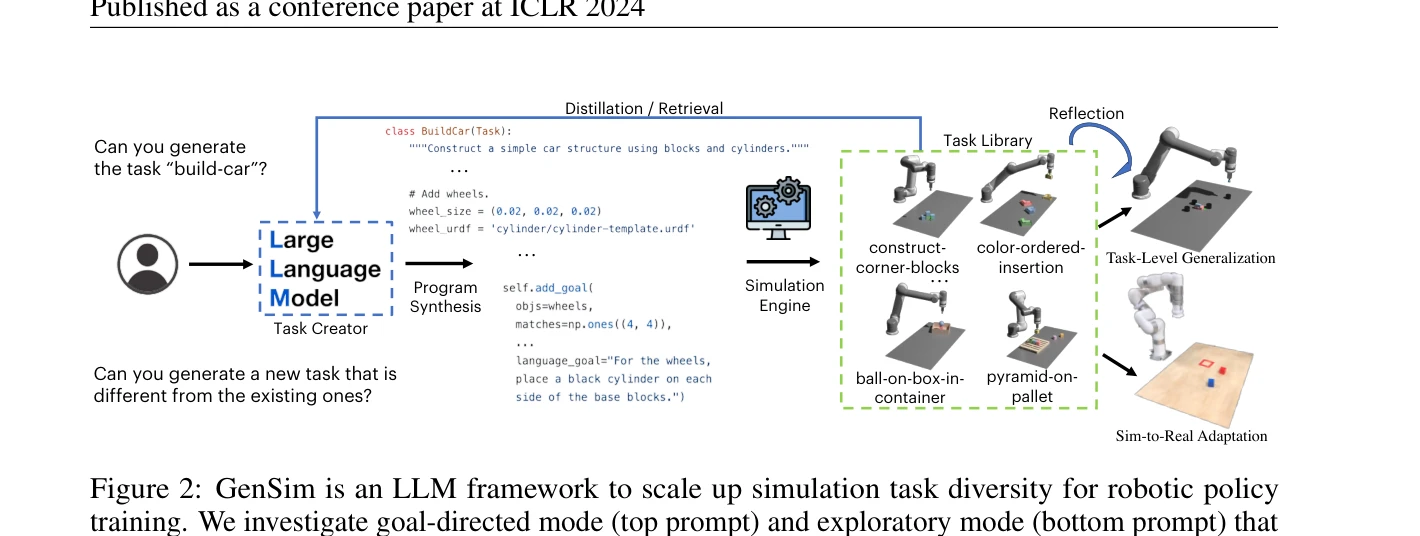
Figure 2: GenSim is an LLM framework to scale up simulation task diversity for robotic policy
GenSim은 LLM의 코드 생성 능력을 활용하여 로봇 시뮬레이션 작업을 자동으로 생성하는 프레임워크로, 기존 10개의 수작업 작업을 100개 이상으로 확장하여 작업 수준의 일반화를 달성한다.
저자: Lirui Wang, Yiyang Ling, Zhecheng Yuan, Mohit Shridhar, Chen Bao, Yuzhe Qin, Bailin Wang, Huazhe Xu, Xiaolong Wang | 날짜: 2023-10-02 | URL: https://arxiv.org/abs/2310.01361 📄 PDF
Figure 2: GenSim is an LLM framework to scale up simulation task diversity for robotic policy
GenSim은 LLM의 코드 생성 능력을 활용하여 로봇 시뮬레이션 작업을 자동으로 생성하는 프레임워크로, 기존 10개의 수작업 작업을 100개 이상으로 확장하여 작업 수준의 일반화를 달성한다.

Figure 1: Task gallery of over 100 tasks generated by GPT4. GenSim leverages a LLM code
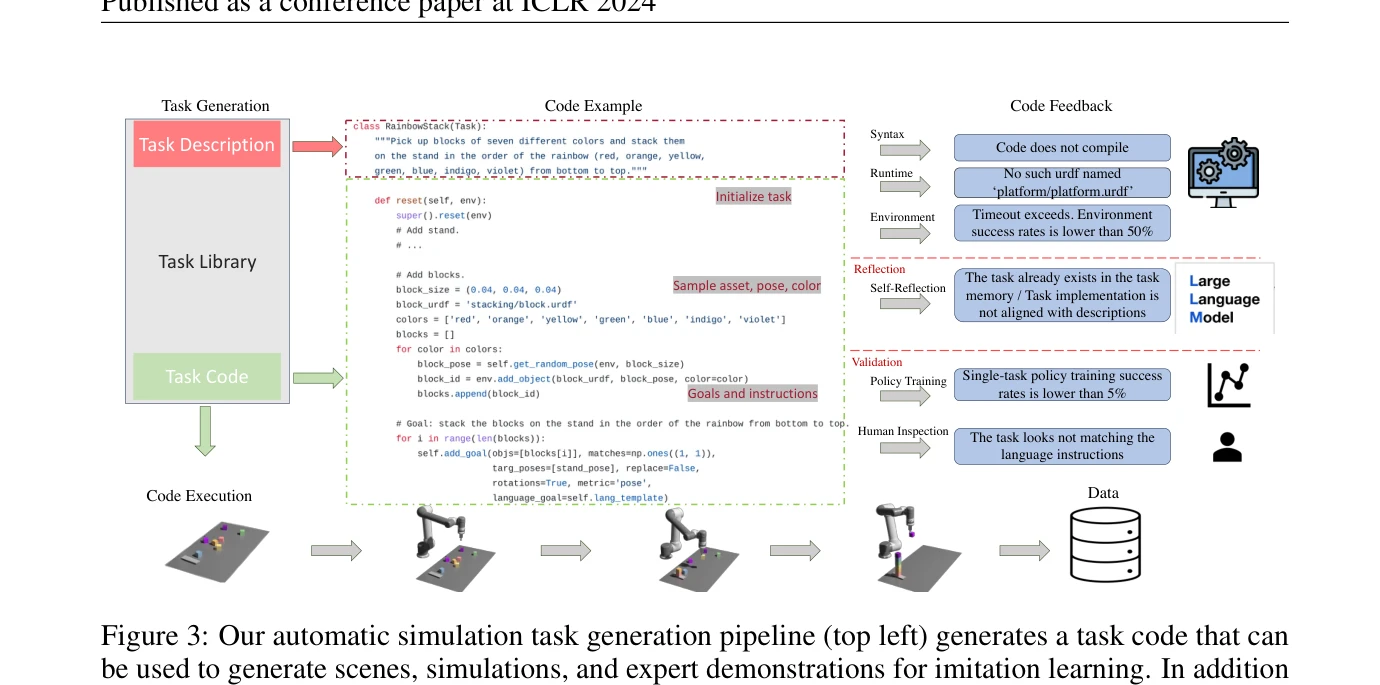
Figure 3: Our automatic simulation task generation pipeline (top left) generates a task code that can
총평: GenSim은 LLM의 코드 생성 능력을 로봇 시뮬레이션에 창의적으로 적용하여 작업 수준 다양성을 획기적으로 확대하고, 실증적으로 정책 일반화와 sim-to-real 전이 성능을 크게 향상시킨 혁신적인 연구이다. 다만 복잡한 환경과 더 다양한 실제 로봇에서의 일반화 검증이 필요하다.