Essence
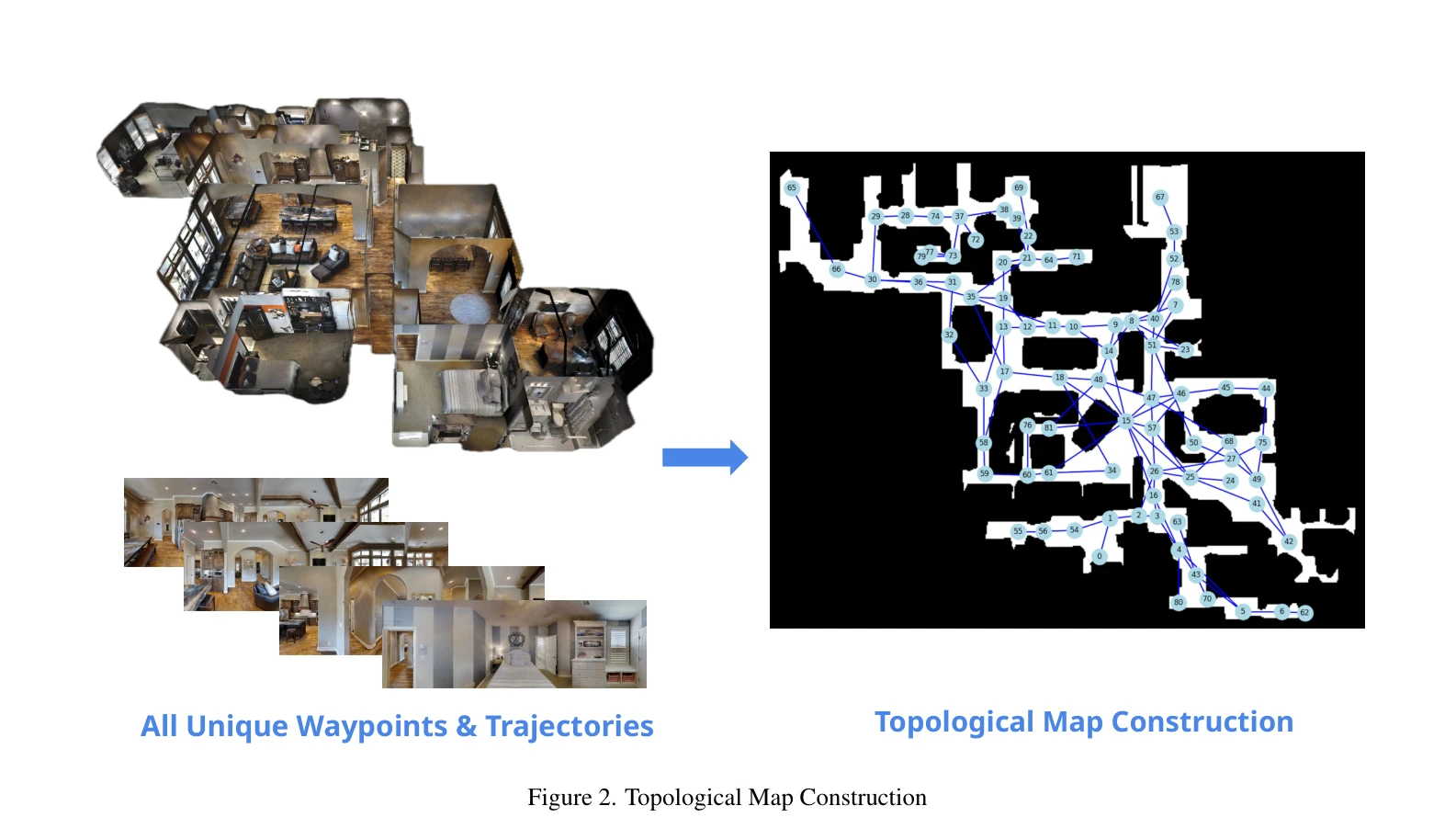
Figure 2. Topological Map Construction
Vision-Language Navigation 문제를 LLM과 VLM을 활용한 모듈식 접근으로 해결하며, 자연어 지시에서 landmark를 추출하고 topological map에서 경로를 검색하여 dynamic programming으로 정렬 점수를 계산한다.
저자: Navid Rajabi, Jana Kosecka | 날짜: 2025-02-11 | URL: https://arxiv.org/abs/2502.07306 📄 PDF
Figure 2. Topological Map Construction
Vision-Language Navigation 문제를 LLM과 VLM을 활용한 모듈식 접근으로 해결하며, 자연어 지시에서 landmark를 추출하고 topological map에서 경로를 검색하여 dynamic programming으로 정렬 점수를 계산한다.
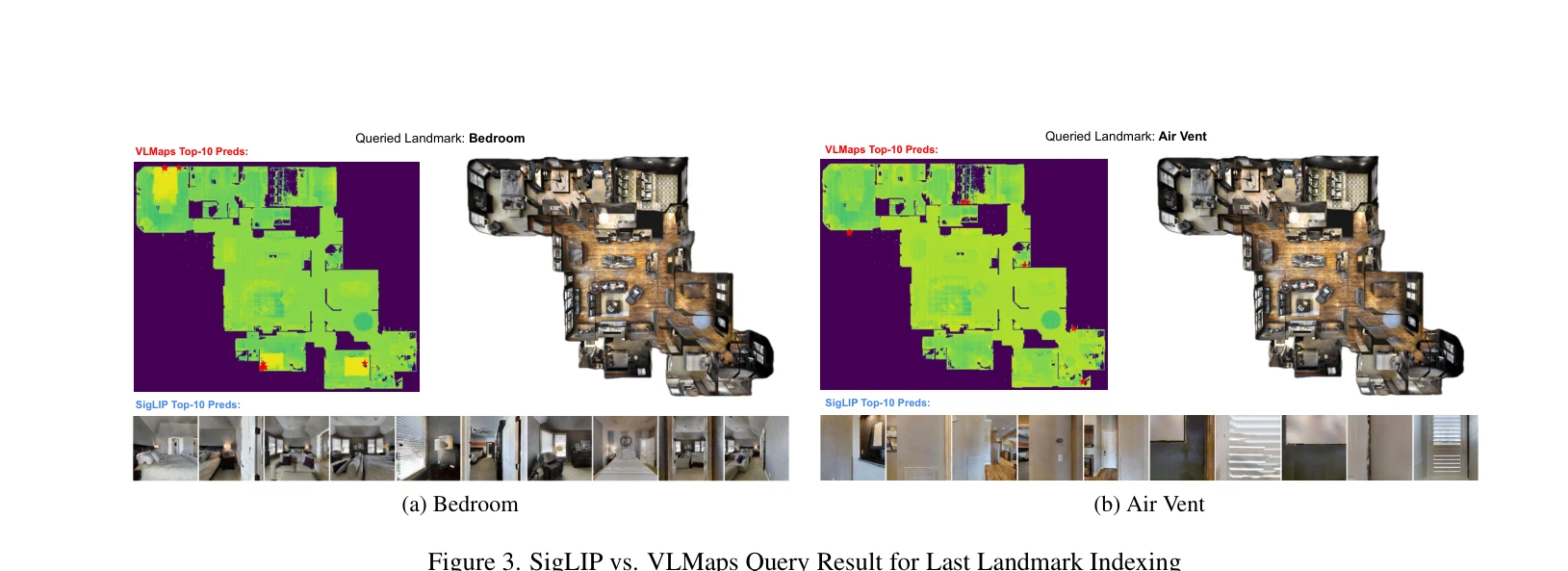
Figure 3. SigLIP vs. VLMaps Query Result for Last Landmark Indexing
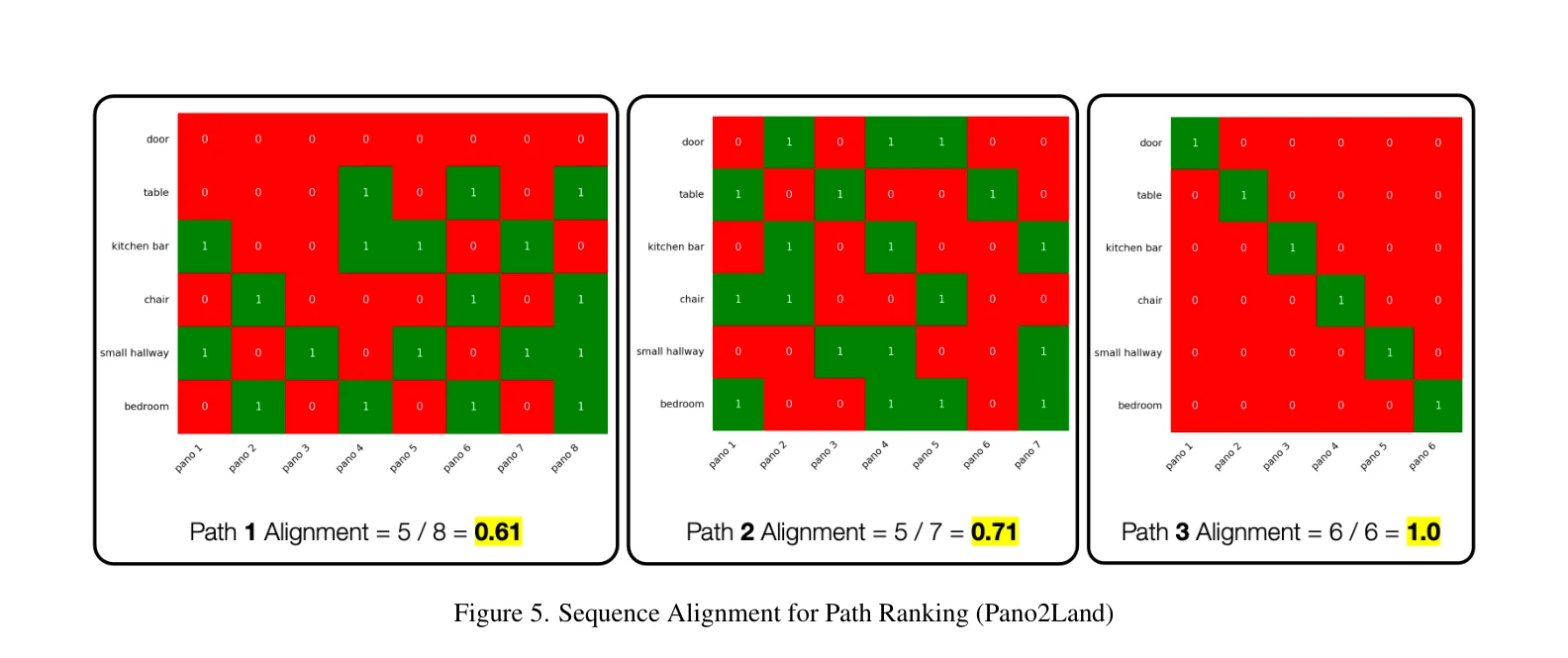
Figure 5. Sequence Alignment for Path Ranking (Pano2Land)
총평: 이 논문은 LLM과 VLM을 체계적으로 결합한 modular VLN 접근법으로 training-free 학습이 가능함을 보이며, 복잡한 R2R-Habitat 지시셋에서 기존 방법 대비 우수한 성능을 달성한다. 다만 알려진 맵의 존재 가정과 spatial constraint 처리의 한계는 실제 환경 적용에 있어 개선이 필요하다.