Essence
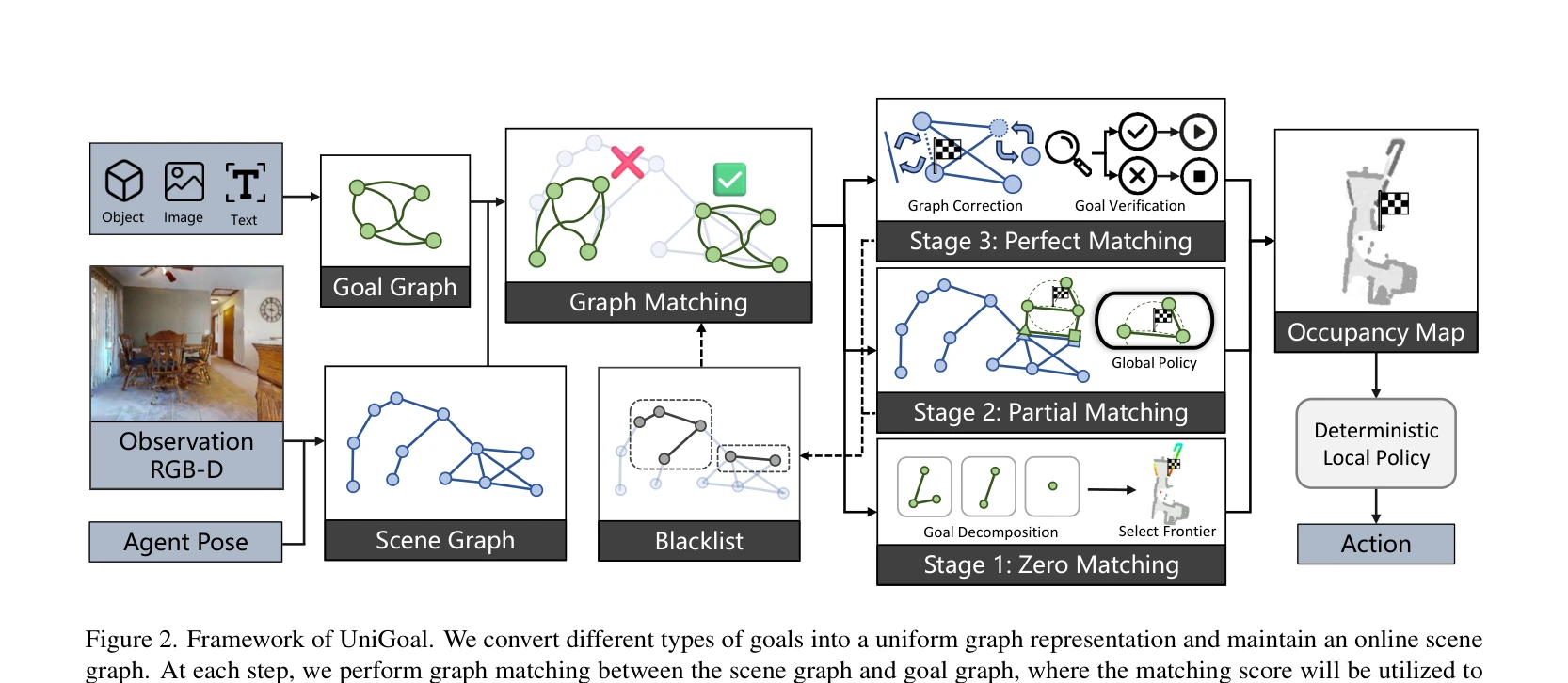
Figure 2. Framework of UniGoal. We convert different types of goals into a uniform graph representation and maintain an
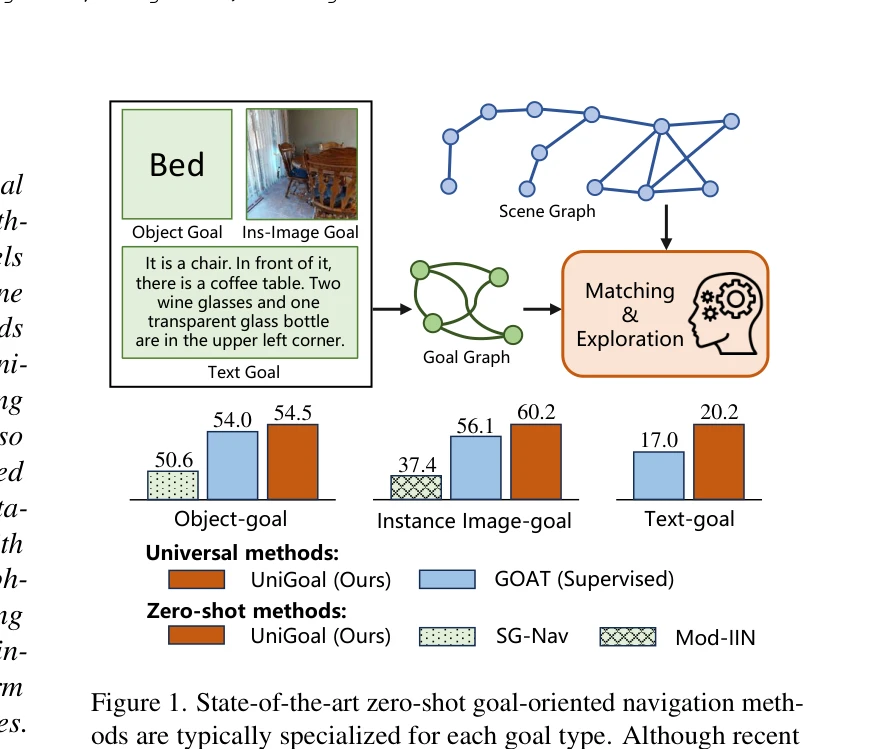
UniGoal은 object category, instance image, text description 등 다양한 목표 유형을 통일된 graph 표현으로 변환하여 LLM 기반의 단일 모델로 세 가지 navigation 작업을 zero-shot으로 수행하는 범용 프레임워크를 제안한다.