저자: Lucy Xiaoyang Shi, Brian Ichter, Michael Equi, Liyiming Ke, Karl Pertsch, Quan Vuong, James Tanner, Anna Walling, Haohuan Wang, Niccolo Fusai, Adrian Li-Bell, Danny Driess, Lachy Groom, Sergey Levine, Chelsea Finn | 날짜: 2025-02-26 | URL: https://arxiv.org/abs/2502.19417 📄 PDF
Essence
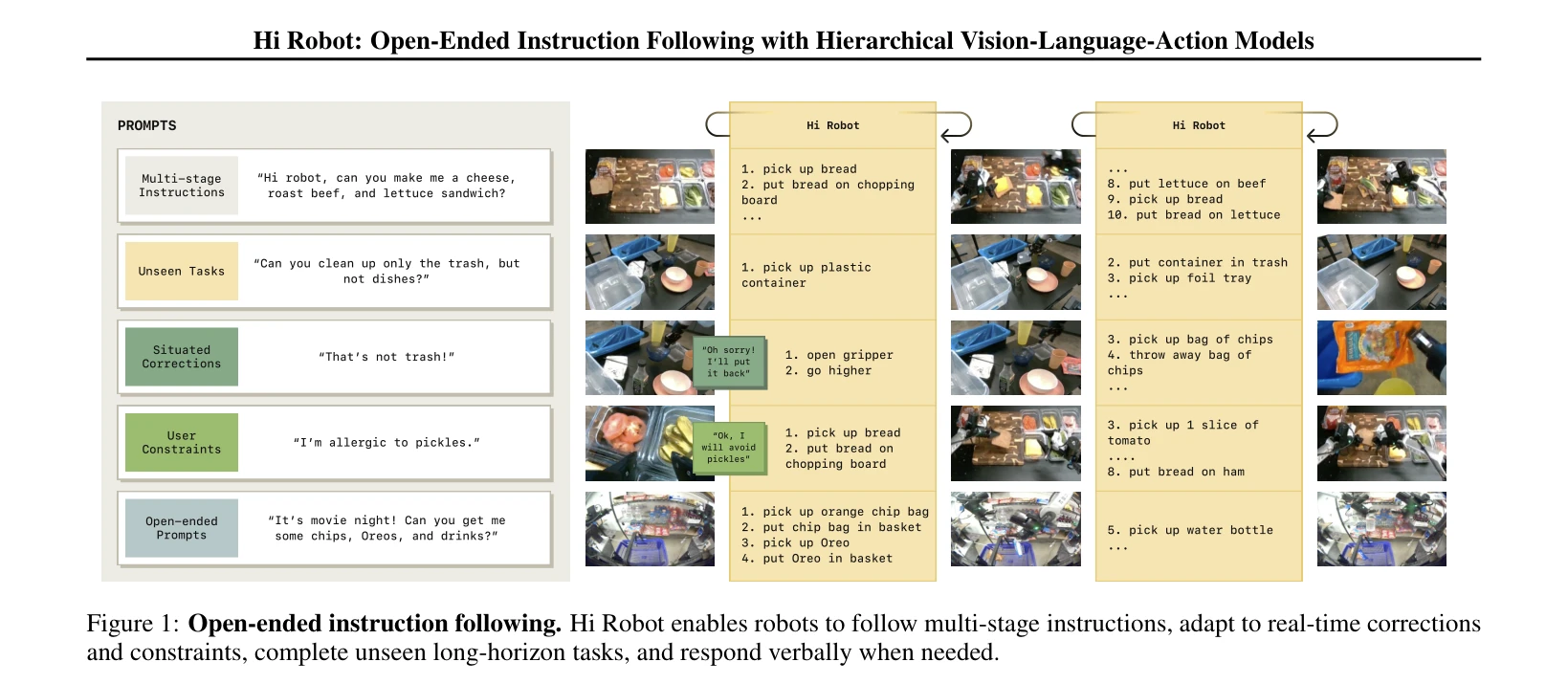
Figure 1: Open-ended instruction following. Hi Robot enables robots to follow multi-stage instructions, adapt to real-ti
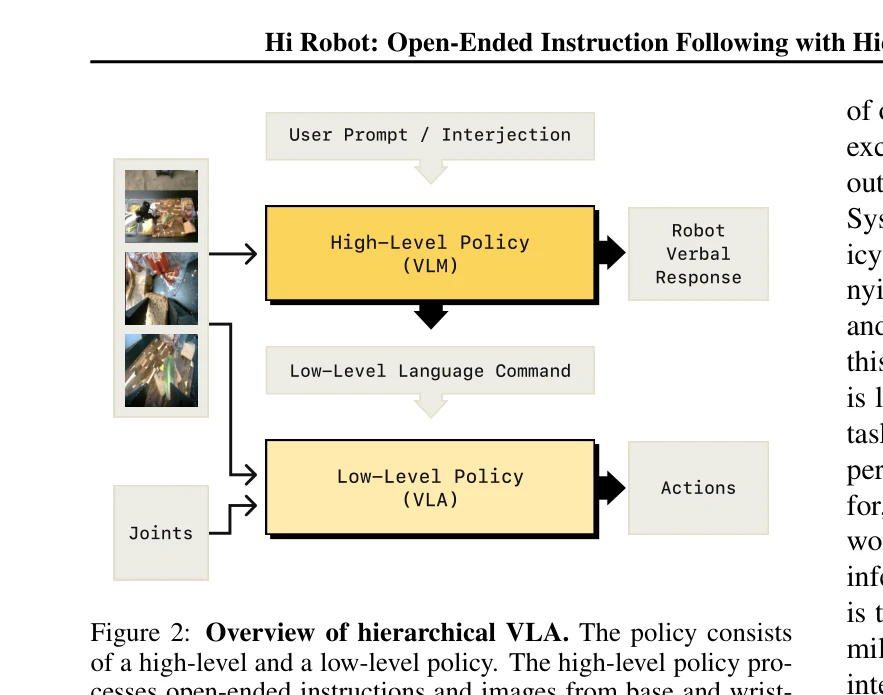
Hi Robot는 계층적 vision-language model 구조를 통해 로봇이 복잡한 자연어 지시사항과 실시간 피드백을 처리하여 개방형 과제를 수행할 수 있도록 하는 시스템이다. 고수준 VLM이 복잡한 프롬프트를 해석하여 원자적 명령어를 생성하고, VLA 정책이 이를 실행하는 두 단계 계층 구조를 제안한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
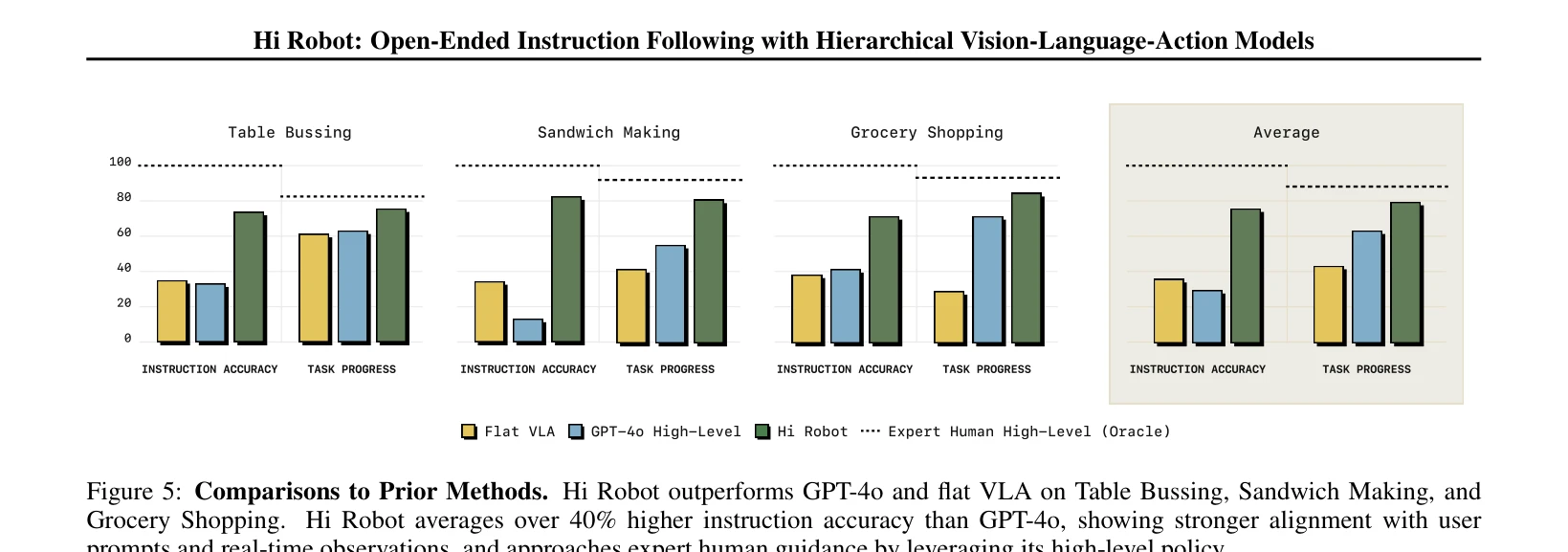
총평: Hi Robot은 계층적 VLM-VLA 구조와 합성 프롬프트 생성을 통해 로봇의 복잡한 지시 따르기와 실시간 피드백 통합 능력을 크게 향상시킨 중요한 기여이다. 다양한 플랫폼에서의 실험 검증과 기존 방법 대비 우수한 성능을 보여주지만, 합성 데이터의 품질, 저수준 정책의 한계, 계산 비용 등에 대한 개선이 필요하다.