저자: Haoran Jiang, Jin Chen, Qingwen Bu, Li Chen, Modi Shi, Yanjie Zhang, Delong Li, Chuanzhe Suo, Chuang Wang, Zhihui Peng, Hongyang Li | 날짜: 2025-12-11 | URL: https://arxiv.org/abs/2512.11047 📄 PDF
Essence
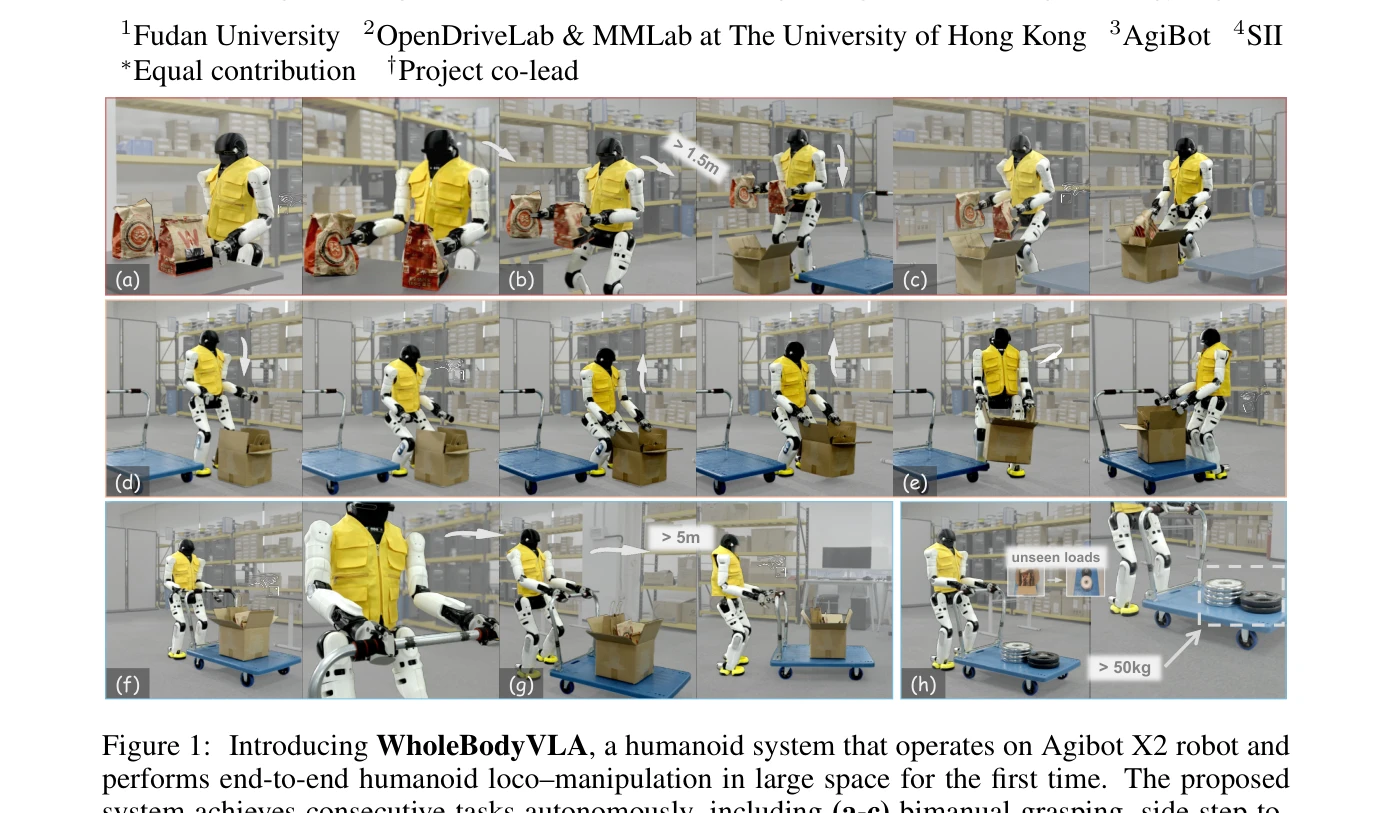
Figure 1: Introducing WholeBodyVLA, a humanoid system that operates on Agibot X2 robot and
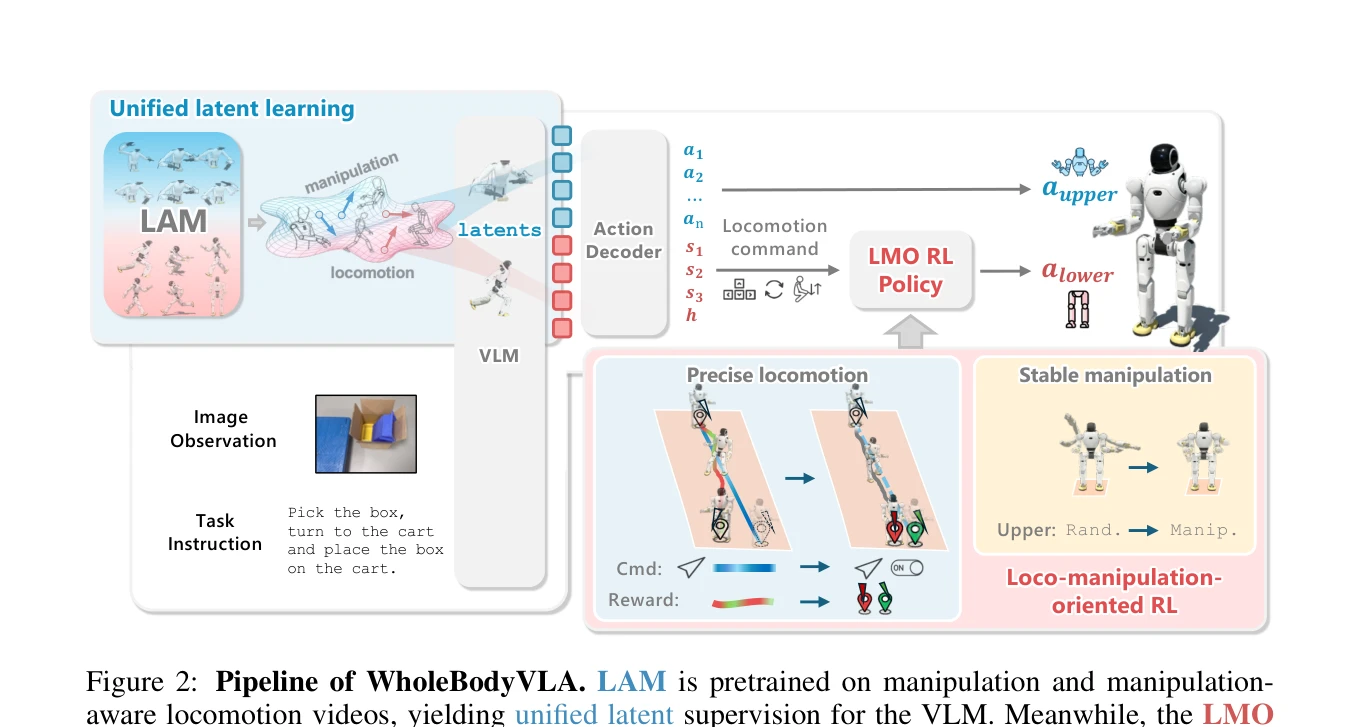
WholeBodyVLA는 Vision-Language-Action 프레임워크로 humanoid 로봇의 대규모 공간에서 end-to-end 전신 조작-이동(loco-manipulation) 제어를 가능하게 한다. Unified latent learning으로 저비용 영상에서 학습하고 LMO RL policy로 정확한 이동 실행을 보장한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: WholeBodyVLA는 humanoid loco-manipulation의 오랜 과제를 action-free 영상 학습과 맞춤형 RL policy로 창의적으로 해결한 강력한 기여이다. 실제 로봇에서의 입증과 21.3% 성능 향상이 실질적 가치를 증명하나, 단일 플랫폼 검증과 이산 명령 제약은 향후 개선 대상이다.