Essence
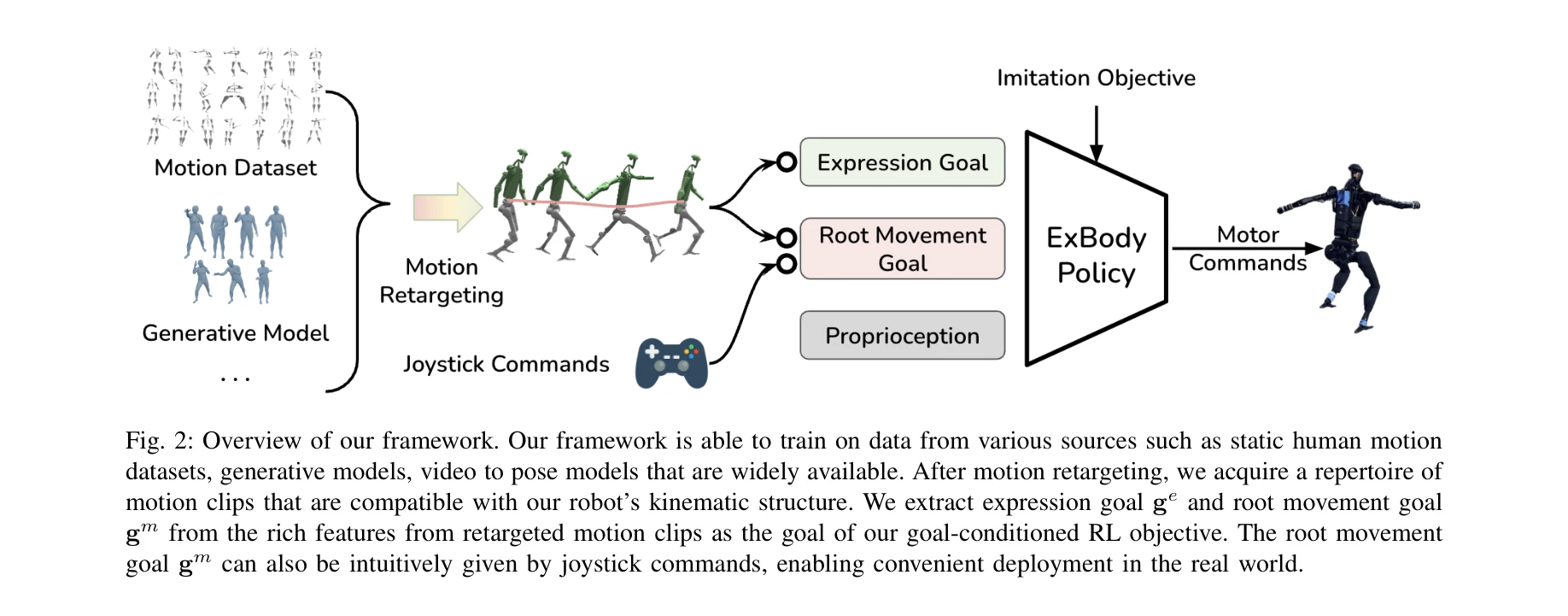
Fig. 2: Overview of our framework. Our framework is able to train on data from various sources such as static human moti
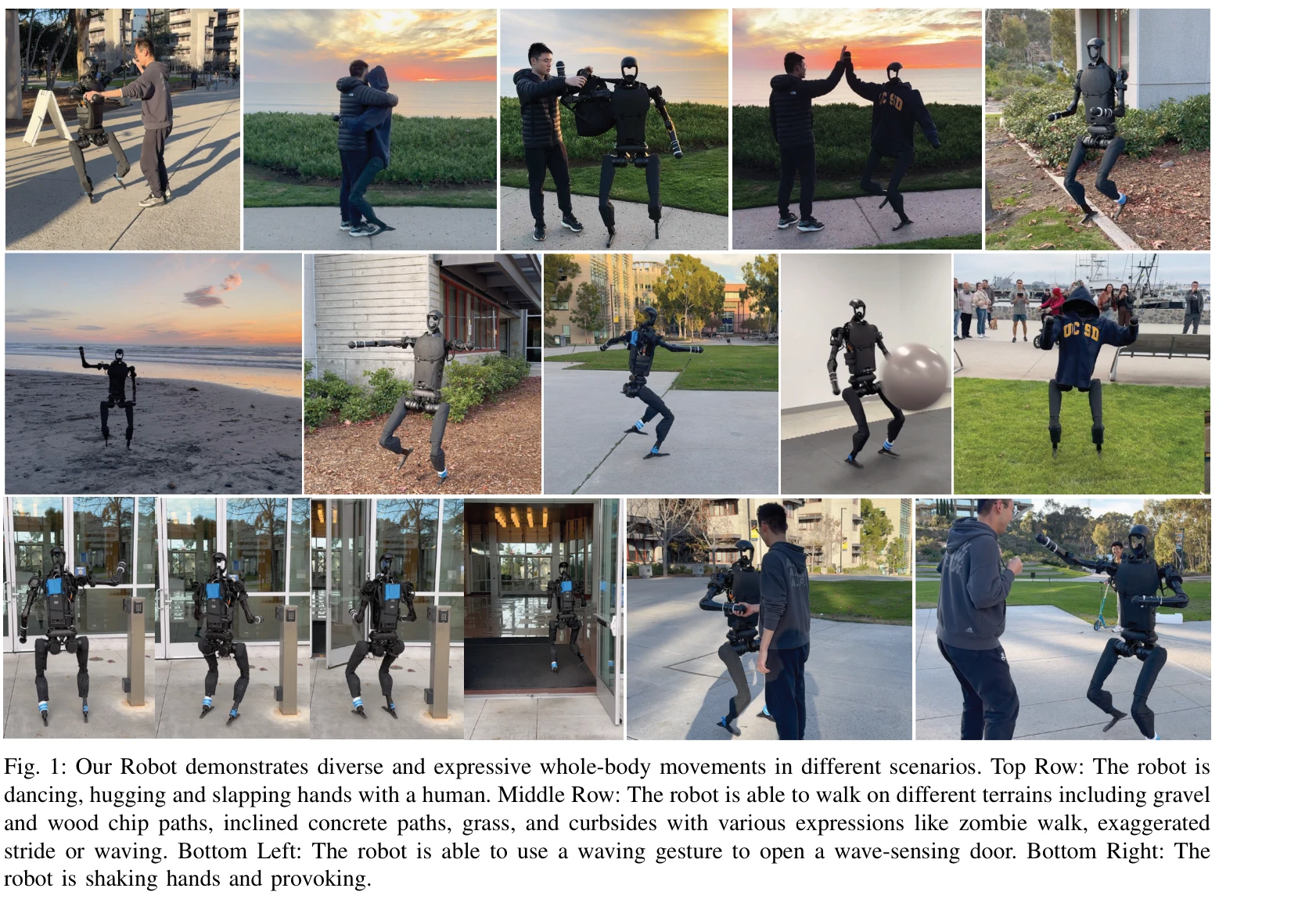
인간형 로봇이 인간의 모션 캡처 데이터를 학습하여 표현력 있는 전신 움직임을 수행하도록 강화학습 기반의 제어 정책을 제안하며, 상체는 참조 모션을 모방하되 하체는 속도 명령만 따르도록 제약을 완화하여 실제 로봇에서의 동작을 가능하게 함.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 본 논문은 인간 모션 캡처 데이터를 실제 인간형 로봇에 효과적으로 적용하는 창의적인 문제 분해 방식과 차등적 제약 설계로, 학습 기반 인간형 로봇 제어 분야에서 처음으로 다양한 표현력 있는 동작을 실현함. 명확한 동기, 실제 로봇 검증, 그리고 우수한 성과에도 불구하고 기술적 신규성이 개별 컴포넌트 수준에서는 제한적이며, 하체 표현력과 다양한 작업 확장에 대한 연구가 필요함.