저자: Junyao Shi, Zhuolun Zhao, Tianyou Wang, Ian Pedroza, Amy Luo, Jie Wang, Jason Ma, Dinesh Jayaraman | 날짜: 2025-03-31 | URL: https://arxiv.org/abs/2503.23877 📄 PDF
Essence
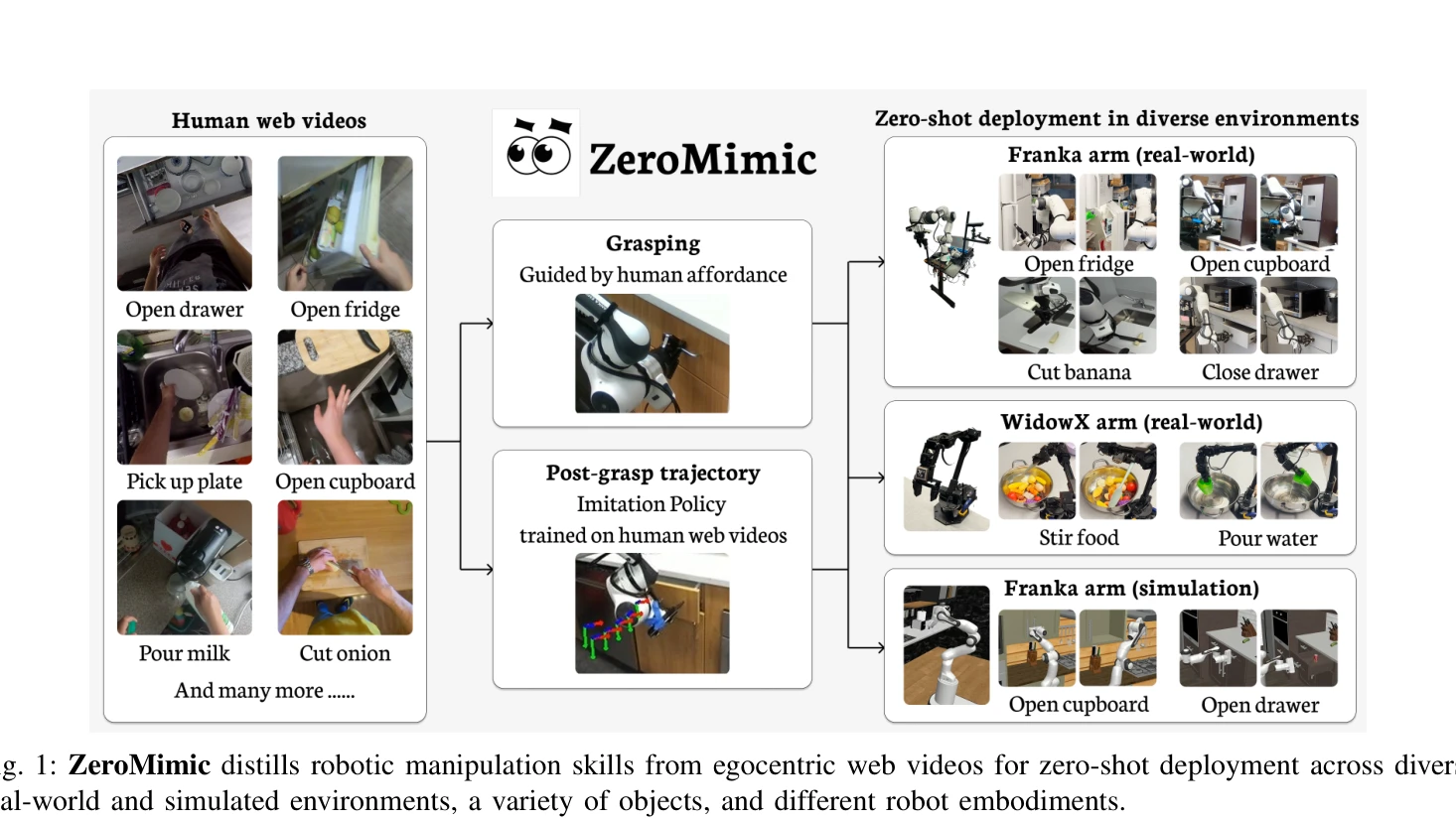
Fig. 1: ZeroMimic distills robotic manipulation skills from egocentric web videos for zero-shot deployment across divers
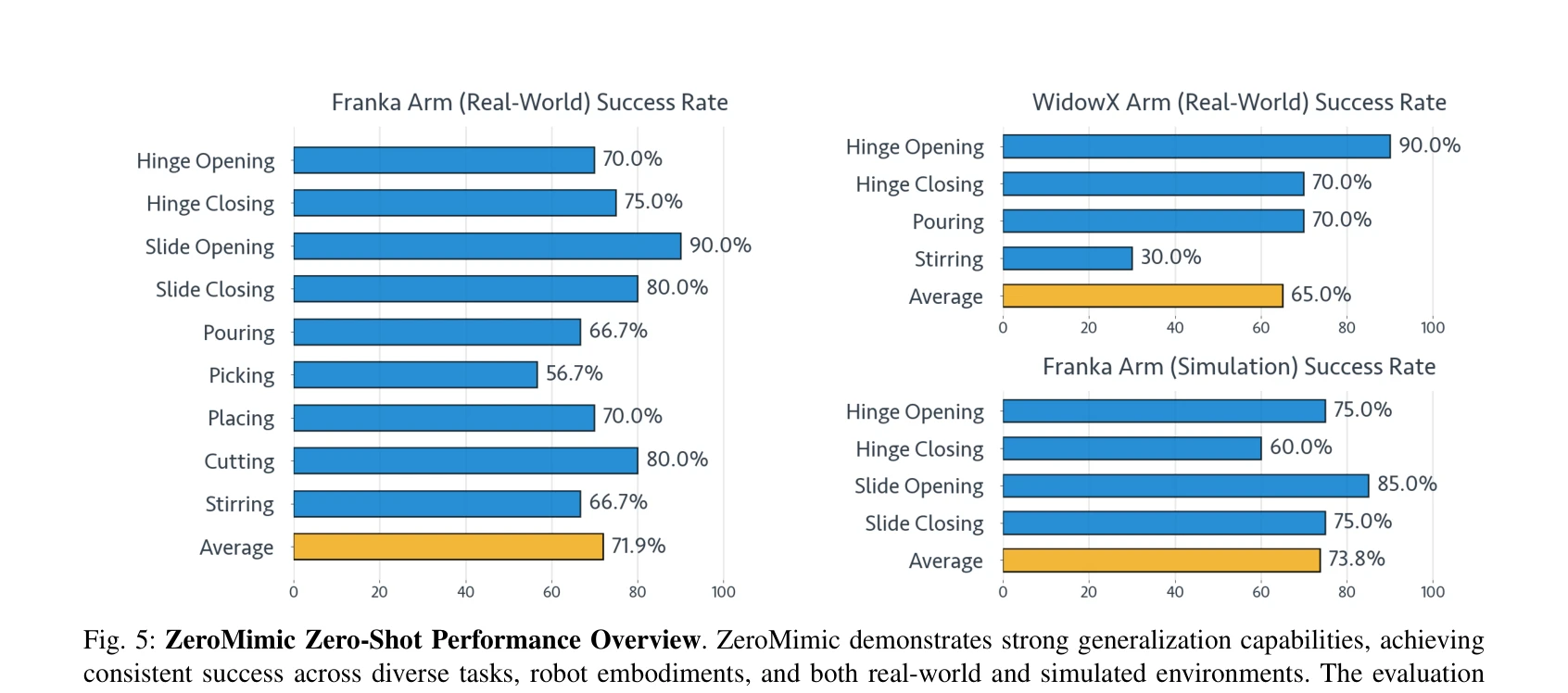
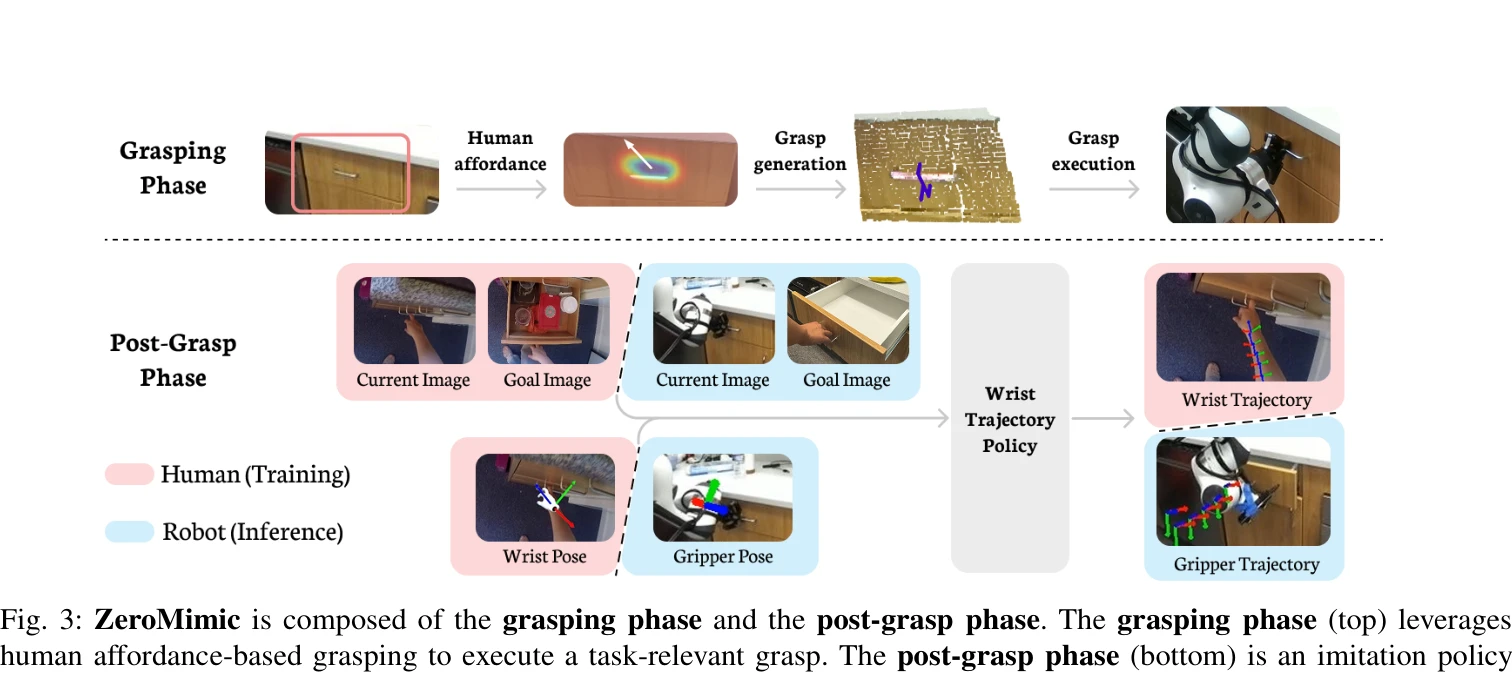
ZeroMimic은 EpicKitchens 데이터셋의 일반 인간 비디오로부터 로봇 조작 스킬을 직접 추출하여, 로봇별 데모나 탐색 없이 즉시 배포 가능한 이미지 목표 조건부 스킬 정책을 생성하는 첫 번째 시스템이다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: ZeroMimic은 in-the-wild 인간 비디오로부터 로봇 조작 스킬을 직접 추출하는 실질적이고 확장 가능한 접근법을 제시하며, 71%대의 현실적 성공률로 실용성을 입증한다. 로봇 학습의 데이터 병목을 해소하는 중요한 진전이지만, 평가 범위 확대와 실패 분석 강화가 향후 과제이다.