Essence
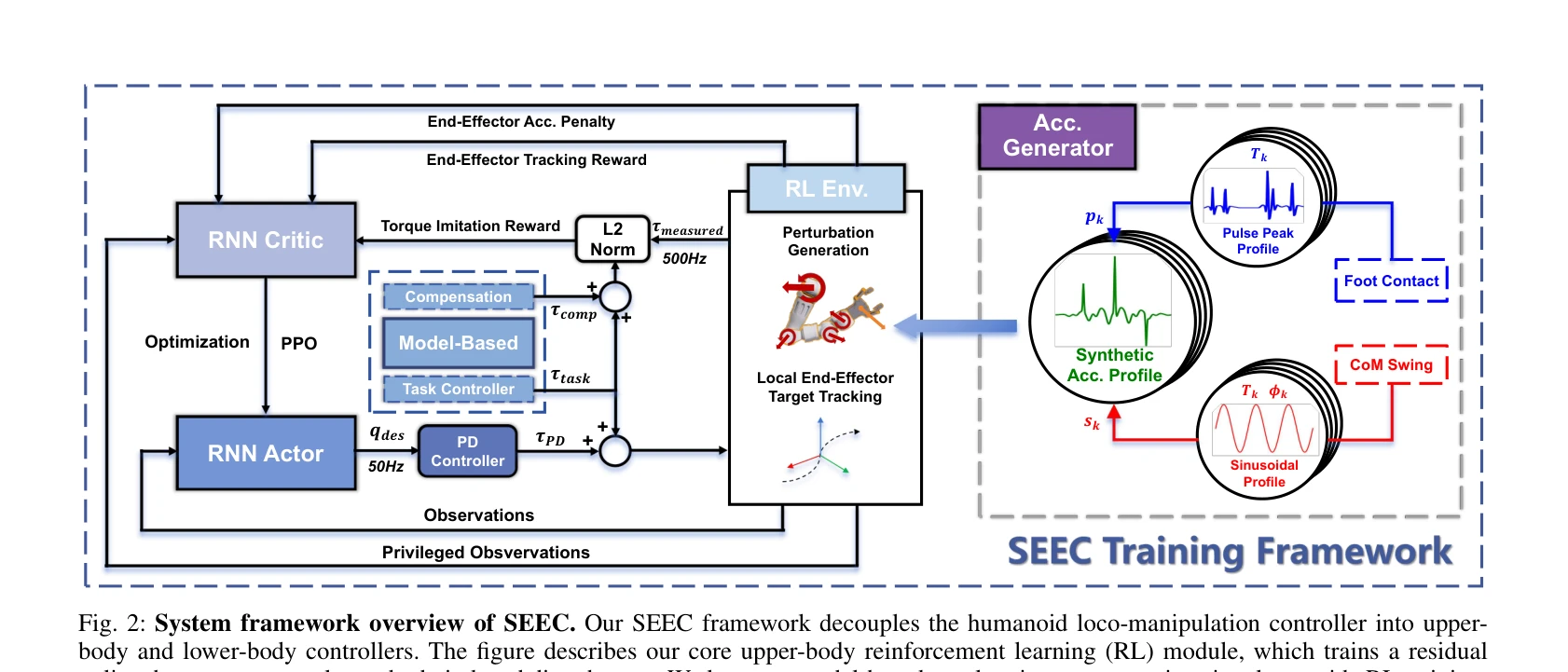
Fig. 2: System framework overview of SEEC. Our SEEC framework decouples the humanoid loco-manipulation controller into u
SEEC는 model-enhanced residual learning을 통해 휴머노이드 로봇의 보행 중 팔 end-effector를 안정적으로 제어하는 프레임워크로, 하지 유도 교란에 대해 모델 기반 보상 신호를 RL 정책에 통합한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: SEEC는 모델 기반 제어의 정밀성과 RL의 적응성을 효과적으로 결합하며, perturbation 생성을 통한 모듈식 설계로 미학습 제어기에도 robust하게 전이되는 점에서 높은 독창성을 보인다. 실제 휴머노이드 로봇 배포와 다양한 loco-manipulation 작업 검증으로 실용성도 입증하였다.