Essence
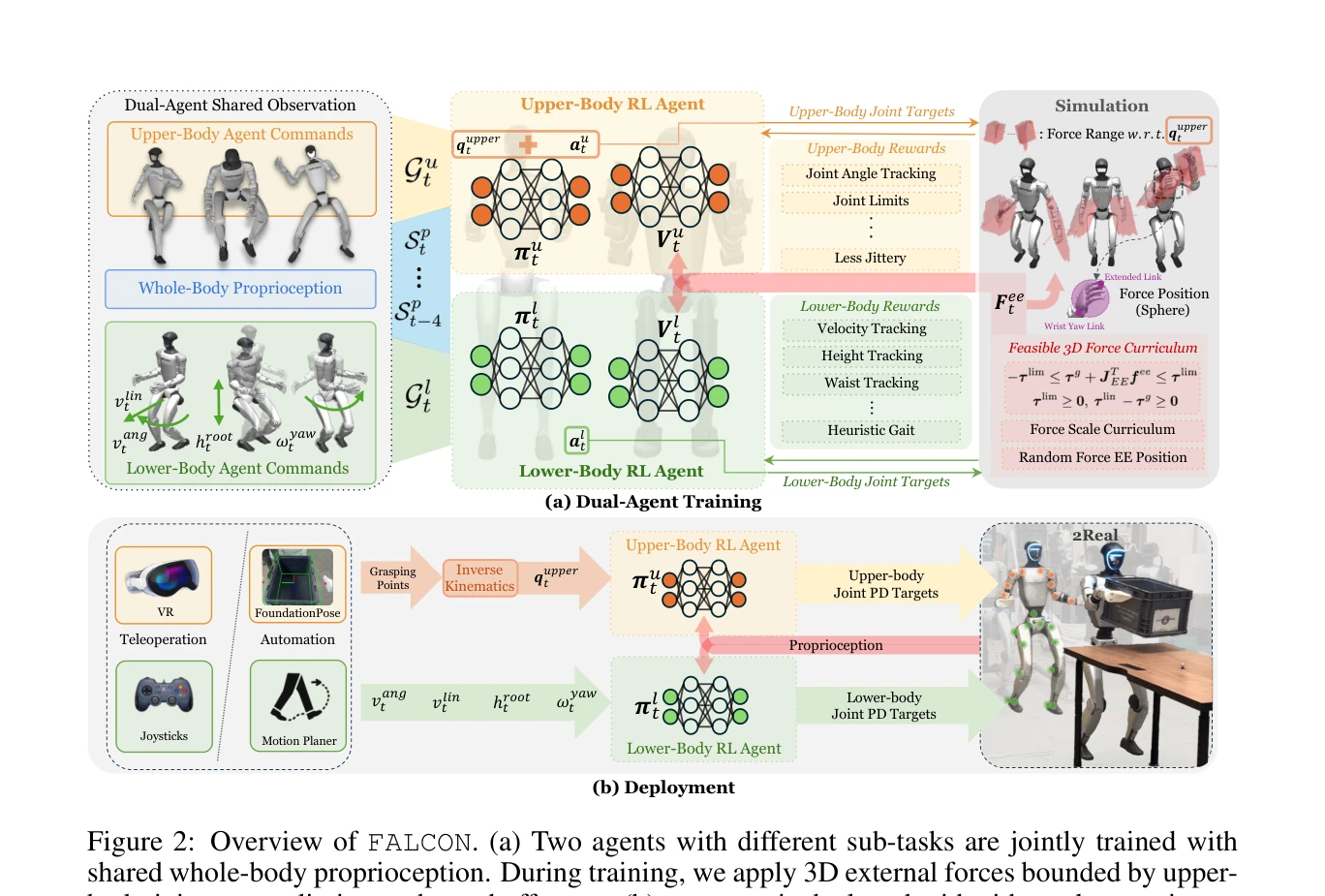
Figure 2: Overview of FALCON. (a) Two agents with different sub-tasks are jointly trained with
FALCON은 이중 에이전트 강화학습 프레임워크로, 하체의 안정적 보행과 상체의 정밀한 말단 장치 위치 추적을 분리하여 학습함으로써 휴머노이드 로봇이 0-100N의 큰 외부 힘에 적응하면서 강제적 작업을 수행하도록 한다.
저자: Yuanhang Zhang, Yifu Yuan, Prajwal Gurunath, Ishita Gupta, Shayegan Omidshafiei, Ali-akbar Agha-mohammadi, Marcell Vazquez-Chanlatte, Liam Pedersen, Tairan He, Guanya Shi | 날짜: 2025-05-10 | URL: https://arxiv.org/abs/2505.06776 📄 PDF
Figure 2: Overview of FALCON. (a) Two agents with different sub-tasks are jointly trained with
FALCON은 이중 에이전트 강화학습 프레임워크로, 하체의 안정적 보행과 상체의 정밀한 말단 장치 위치 추적을 분리하여 학습함으로써 휴머노이드 로봇이 0-100N의 큰 외부 힘에 적응하면서 강제적 작업을 수행하도록 한다.
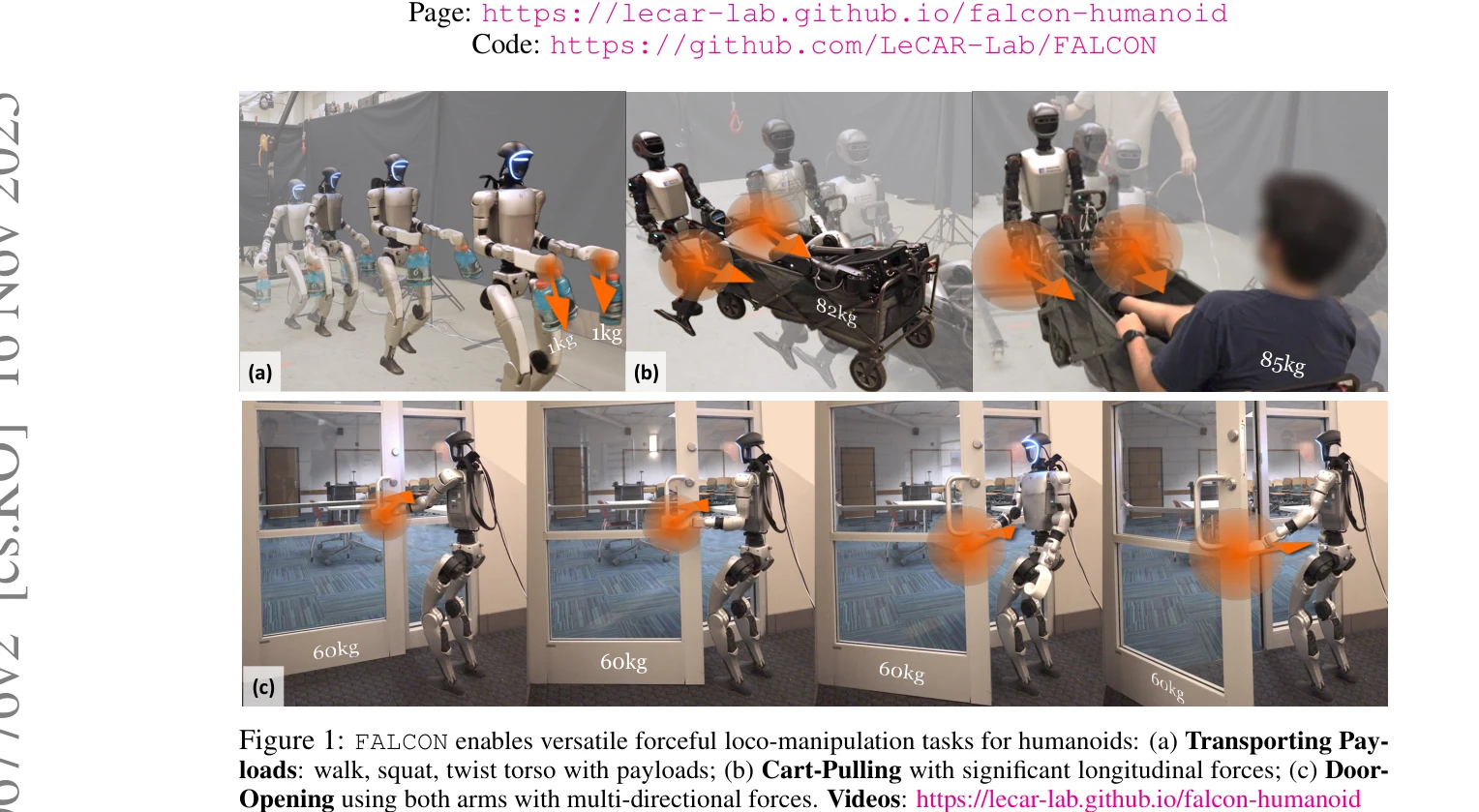
Figure 1: FALCON enables versatile forceful loco-manipulation tasks for humanoids: (a) Transporting Pay-
Figure 2: Overview of FALCON. (a) Two agents with different sub-tasks are jointly trained with
총평: FALCON은 휴머노이드의 강제적 로코-조작 문제를 이중 에이전트 분해와 힘 커리큘럼 설계로 효과적으로 해결하며, 다중 플랫폼 배포와 2배의 추적 정확도 향상을 입증함으로써 실용적 가치가 높다. 다만 sim-to-real 갭 극복 메커니즘과 극단적 환경 강건성에 대한 분석이 더 필요하다.