Essence
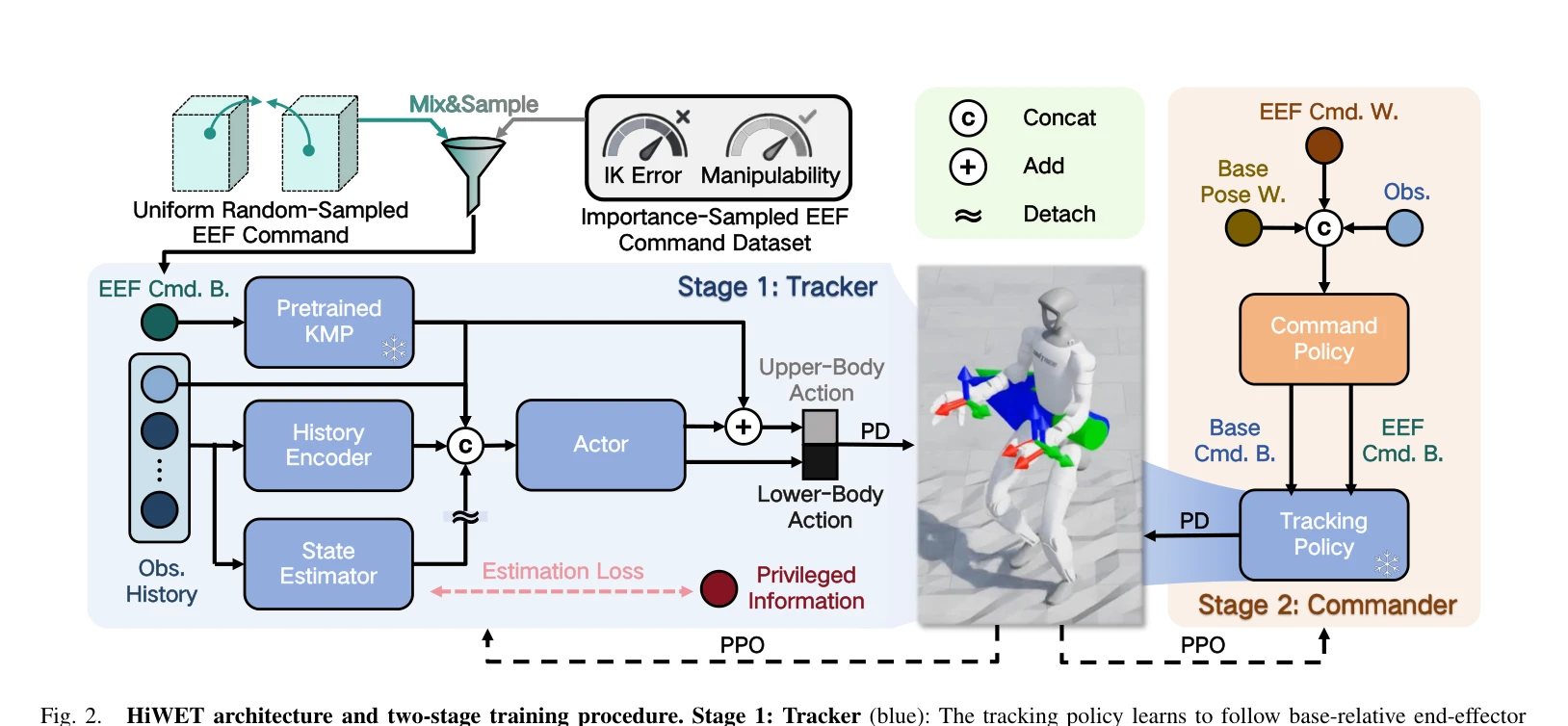
Fig. 2.
HiWET는 휴머노이드 로봇의 장기 조작 작업을 위해 세계 좌표계 기준 end-effector 추적을 명시적으로 수행하는 계층적 강화학습 프레임워크를 제안한다. Kinematic Manifold Prior를 통해 탐색 공간을 감소시키고 동역학적 안정성을 유지하면서 정밀한 추적을 달성한다.
저자: Zhanxiang Cao, Liyun Yan, Yang Zhang, Sirui Chen, Jianming Ma, Tianyue Zhan, Shengcheng Fu, Yufei Jia, Cewu Lu, Yue Gao | 날짜: 2026-02-06 | DOI: 10.48550/arXiv.2602.06341 📄 PDF
Fig. 2.
HiWET는 휴머노이드 로봇의 장기 조작 작업을 위해 세계 좌표계 기준 end-effector 추적을 명시적으로 수행하는 계층적 강화학습 프레임워크를 제안한다. Kinematic Manifold Prior를 통해 탐색 공간을 감소시키고 동역학적 안정성을 유지하면서 정밀한 추적을 달성한다.
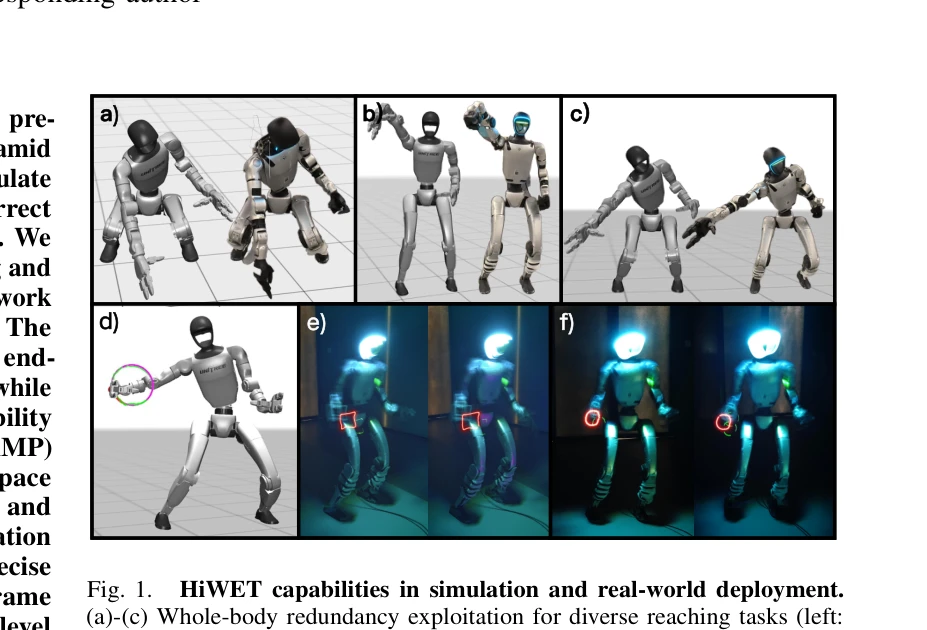
Fig. 1.
Fig. 2.
총평: HiWET는 world-frame 중심 재정의와 Kinematic Manifold Prior를 통해 휴머노이드 조작에서 정밀하고 안정적인 추적을 실현한 창의적 연구이다. 실제 로봇 검증과 12.4 mm의 추적 정확도로 실질적 기여를 입증하였으며, 계층적 설계와 명시적 공간 인터페이스는 장기 로컬로조작 문제의 효과적 해결 방안을 제시한다.