Essence
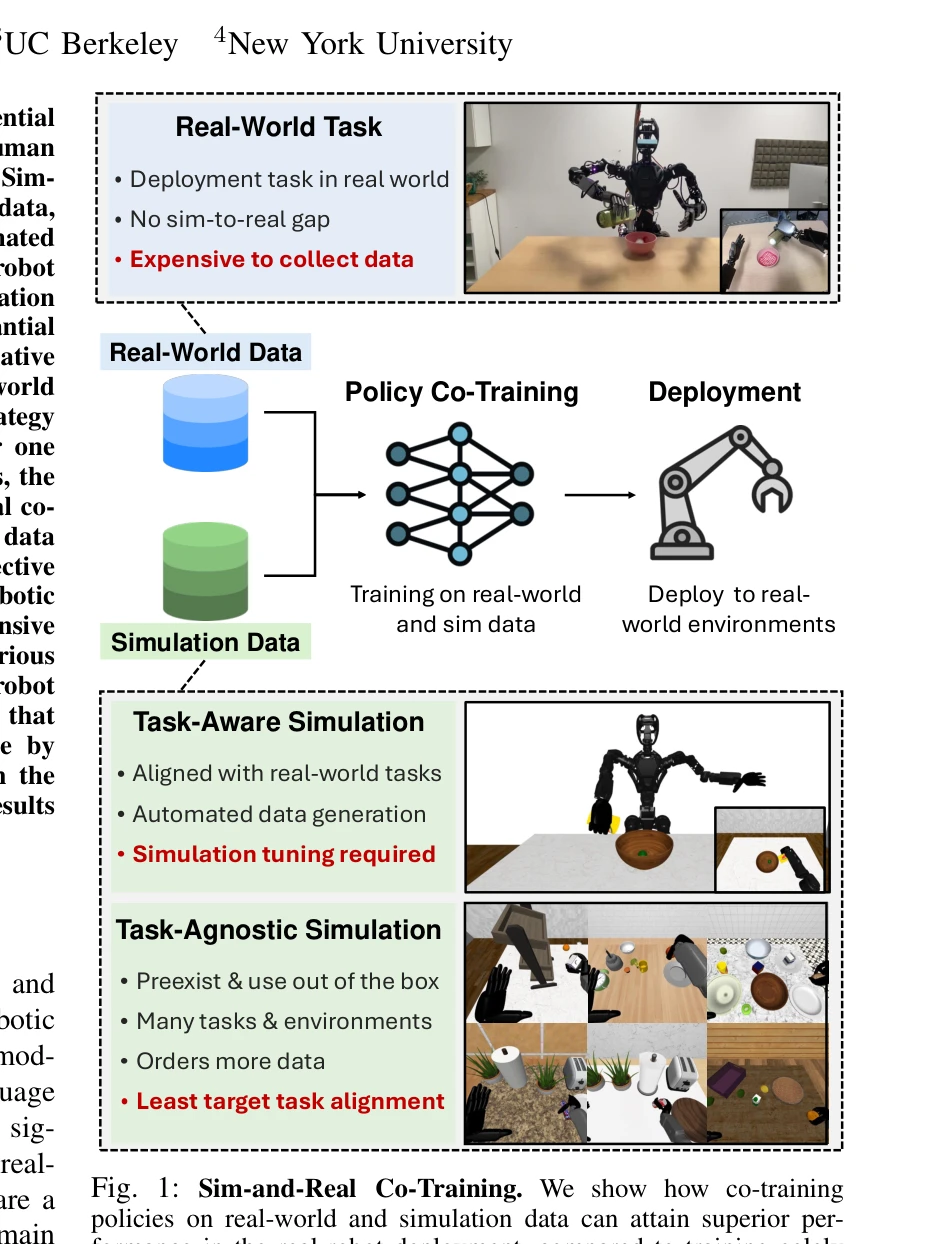
Fig. 1: Sim-and-Real Co-Training. We show how co-training
시뮬레이션 데이터와 실제 로봇 데이터를 혼합하여 학습하는 sim-and-real co-training 전략을 체계적으로 연구하고, 비전 기반 로봇 조작 작업에서 실제 데이터만 사용하는 것 대비 평균 38% 성능 향상을 달성했다.
저자: Abhiram Maddukuri, Zhenyu Jiang, Lawrence Yunliang Chen, Soroush Nasiriany, Yuqi Xie, Yu Fang, Wenqi Huang, Zu Wang, Zhenjia Xu, Nikita Chernyadev, Scott Reed, Ken Goldberg, Ajay Mandlekar, Linxi Fan, Yuke Zhu | 날짜: 2025-03-31 | URL: https://arxiv.org/abs/2503.24361 📄 PDF
Fig. 1: Sim-and-Real Co-Training. We show how co-training
시뮬레이션 데이터와 실제 로봇 데이터를 혼합하여 학습하는 sim-and-real co-training 전략을 체계적으로 연구하고, 비전 기반 로봇 조작 작업에서 실제 데이터만 사용하는 것 대비 평균 38% 성능 향상을 달성했다.
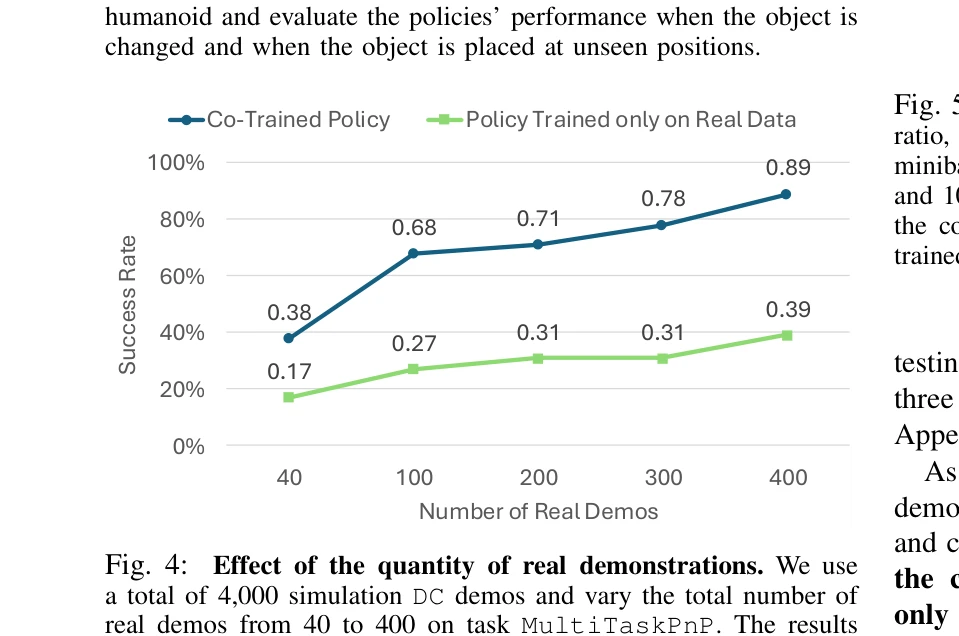
Fig. 4:
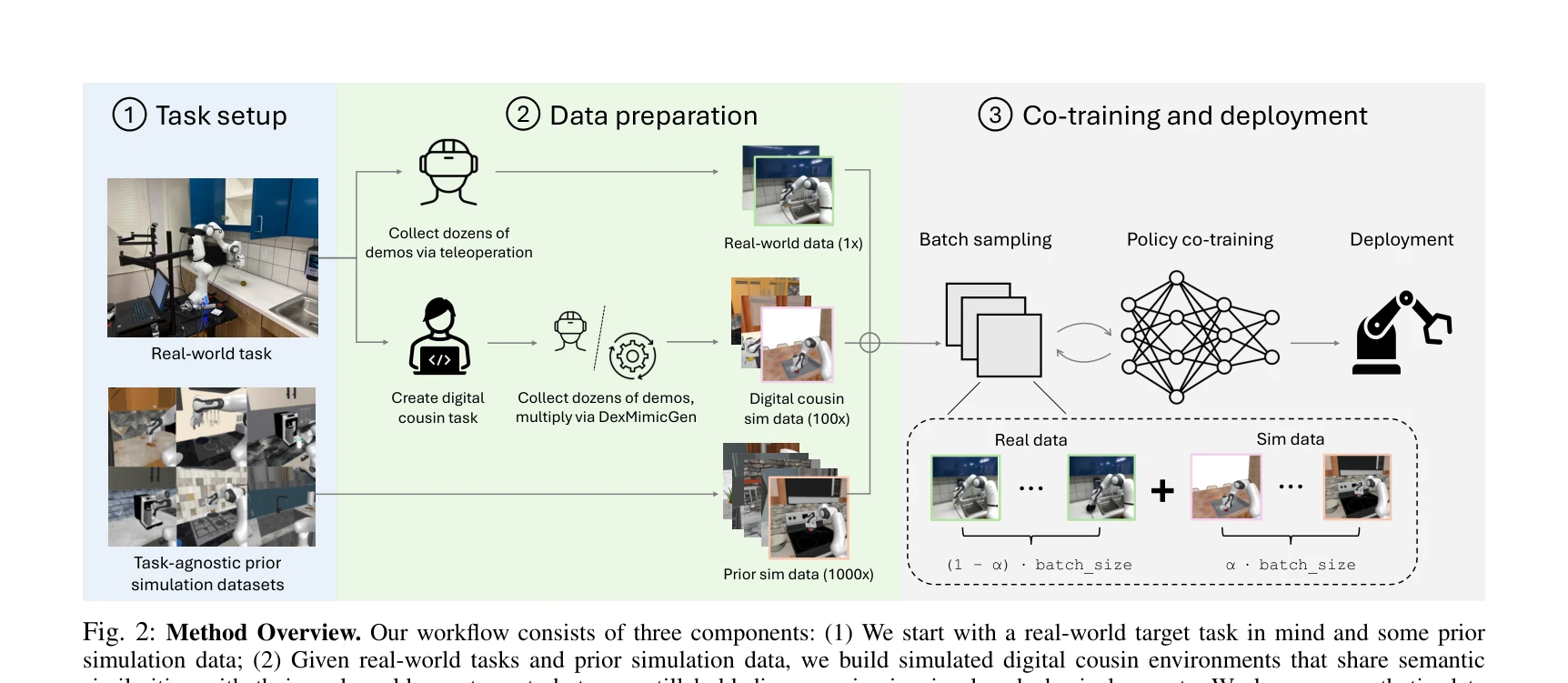
Fig. 2: Method Overview. Our workflow consists of three components: (1) We start with a real-world target task in mind a
총평: 본 논문은 sim-and-real co-training의 실용성을 체계적으로 검증하여 실제 로봇 학습의 데이터 효율성 문제에 직접적인 해결책을 제시하며, 명확한 실험 설계와 실무적 가이드라인으로 로봇 커뮤니티에 높은 가치를 제공한다.