저자: Modi Shi, Shijia Peng, Jin Chen, Haoran Jiang, Yinghui Li, Di Huang, Ping Luo, Hongyang Li, Li Chen | 날짜: 2026-02-10 | DOI: 10.48550/arXiv.2602.10106 📄 PDF
Essence
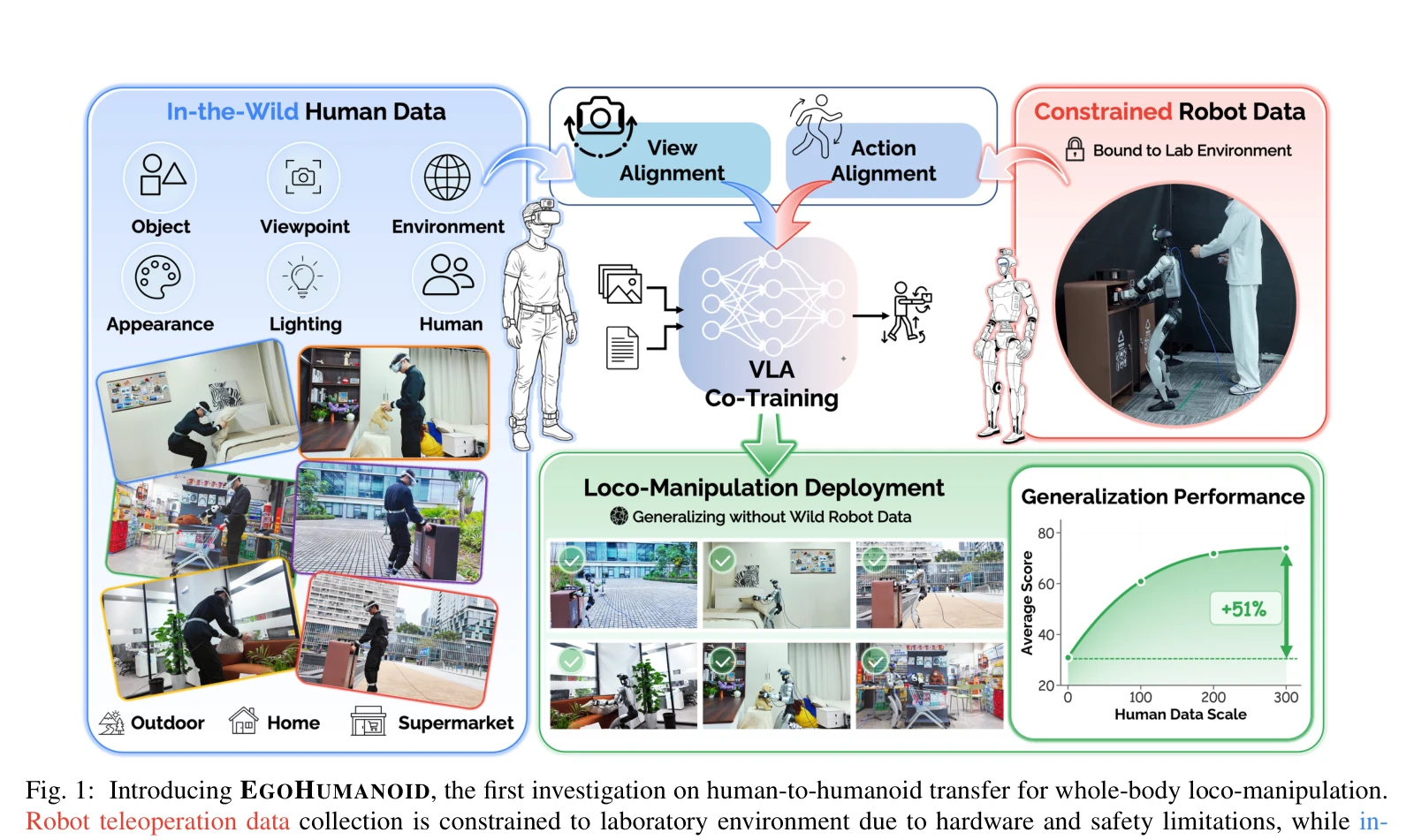
Fig. 1: Introducing EGOHUMANOID, the first investigation on human-to-humanoid transfer for whole-body loco-manipulation.
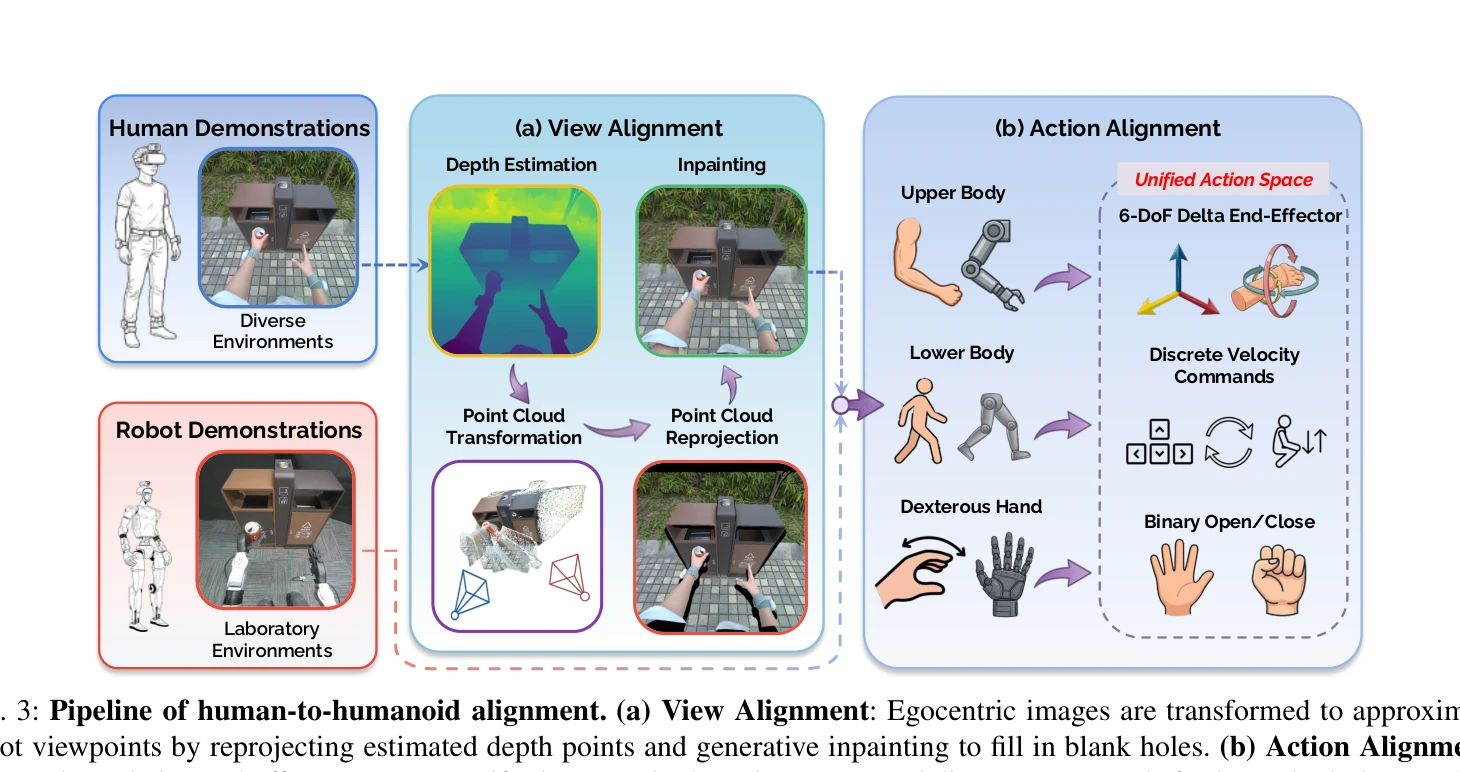
EgoHumanoid는 로봇 없이 수집한 대규모 인간 egocentric 시연과 제한된 로봇 데이터를 co-train하여 휴머노이드 로봇이 다양한 현실 환경에서 loco-manipulation을 수행하도록 하는 첫 번째 프레임워크이다. View alignment와 action alignment로 구성된 embodiment 정렬 파이프라인을 통해 인간-로봇 간의 신체 형태, 관점, 동역학의 차이를 극복한다.
Evaluation
Novelty: 4/5 Technical Soundness: 3/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: EgoHumanoid는 휴머노이드 loco-manipulation 분야에서 human egocentric data 활용의 새로운 가능성을 체계적으로 보여주는 획기적인 작업이다. Practical embodiment alignment pipeline, 현실 환경에서의 강력한 성능 개선(51%), 그리고 scalability 분석은 향후 humanoid 로봇 학습의 중요한 방향을 제시한다.