저자: Ri-Zhao Qiu, Shiqi Yang, Xuxin Cheng, Chaitanya Chawla, Jialong Li, Tairan He, Ge Yan, David J. Yoon, Ryan Hoque, Lars Paulsen, Ge Yang, Jian Zhang, Sha Yi, Guanya Shi, Xiaolong Wang | 날짜: 2025-03-17 | URL: https://arxiv.org/abs/2503.13441 📄 PDF
Essence
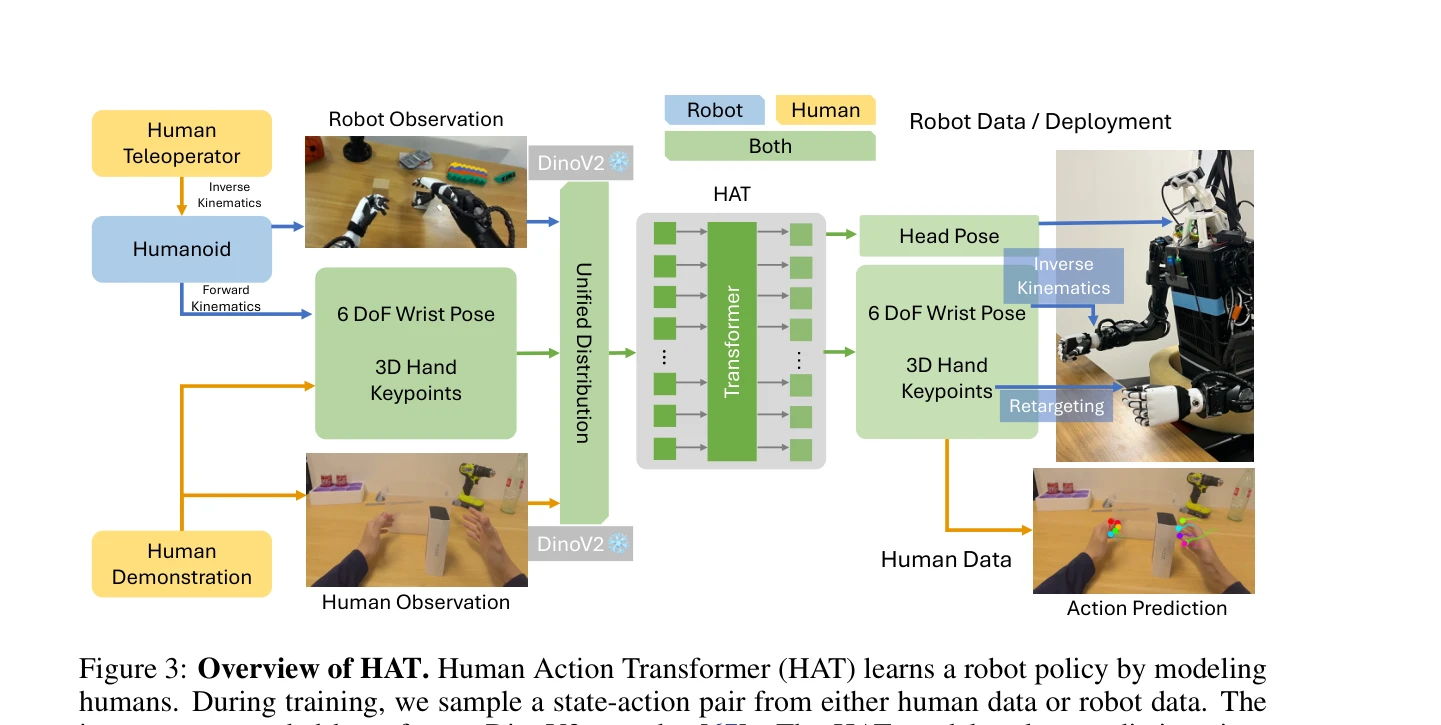
Figure 3: Overview of HAT. Human Action Transformer (HAT) learns a robot policy by modeling
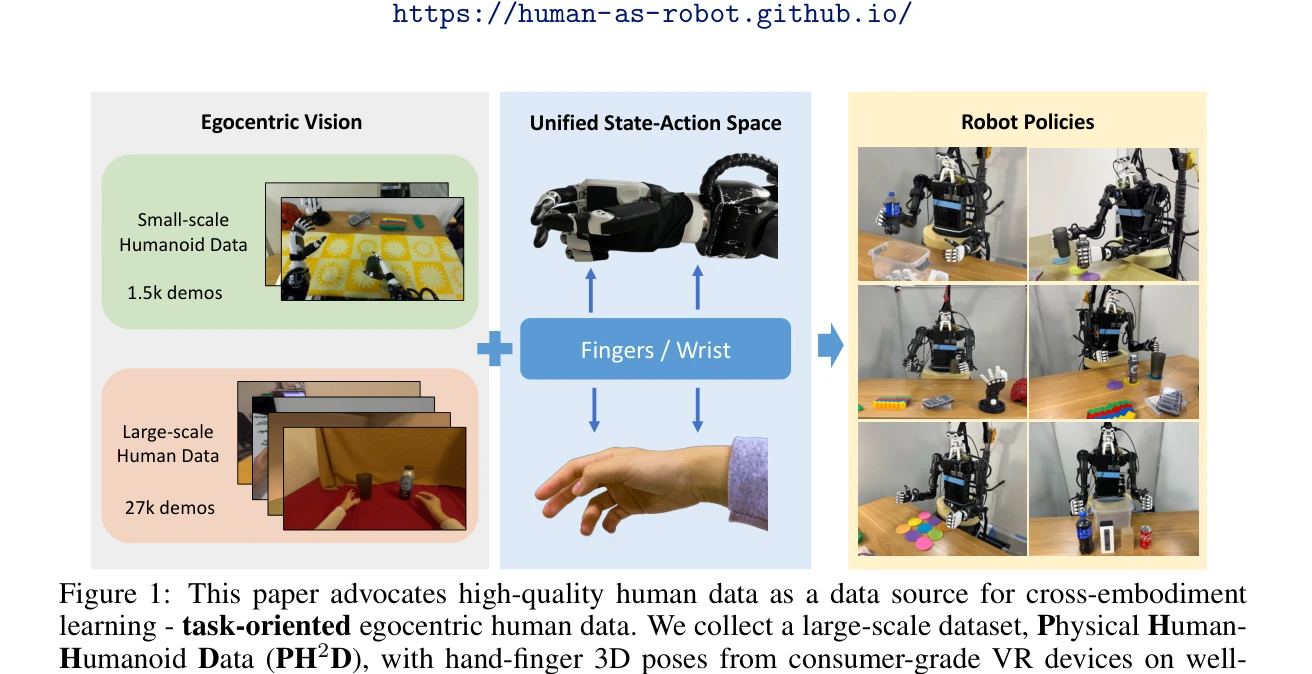
이 논문은 humanoid 로봇의 조작 정책 학습에 대규모 egocentric human demonstration을 활용하는 cross-embodiment 학습 방법을 제안한다. PH2D 데이터셋과 Human Action Transformer (HAT)를 통해 human과 robot 간의 embodiment gap을 완화하고 데이터 수집 효율을 크게 개선한다.
Evaluation
Novelty: 4/5 Technical Soundness: 4/5 Significance: 4/5 Clarity: 4/5 Overall: 4/5
총평: 이 논문은 humanoid robot manipulation 학습을 위해 대규모 human data를 효율적으로 활용하는 실용적이고 창의적인 방안을 제시한다. PH2D 데이터셋의 규모와 품질, HAT의 unified design, 그리고 실로봇 검증이 기여도 있으나, 평가 범위 확장과 다양한 플랫폼으로의 일반화 검증이 필요하다.