Essence
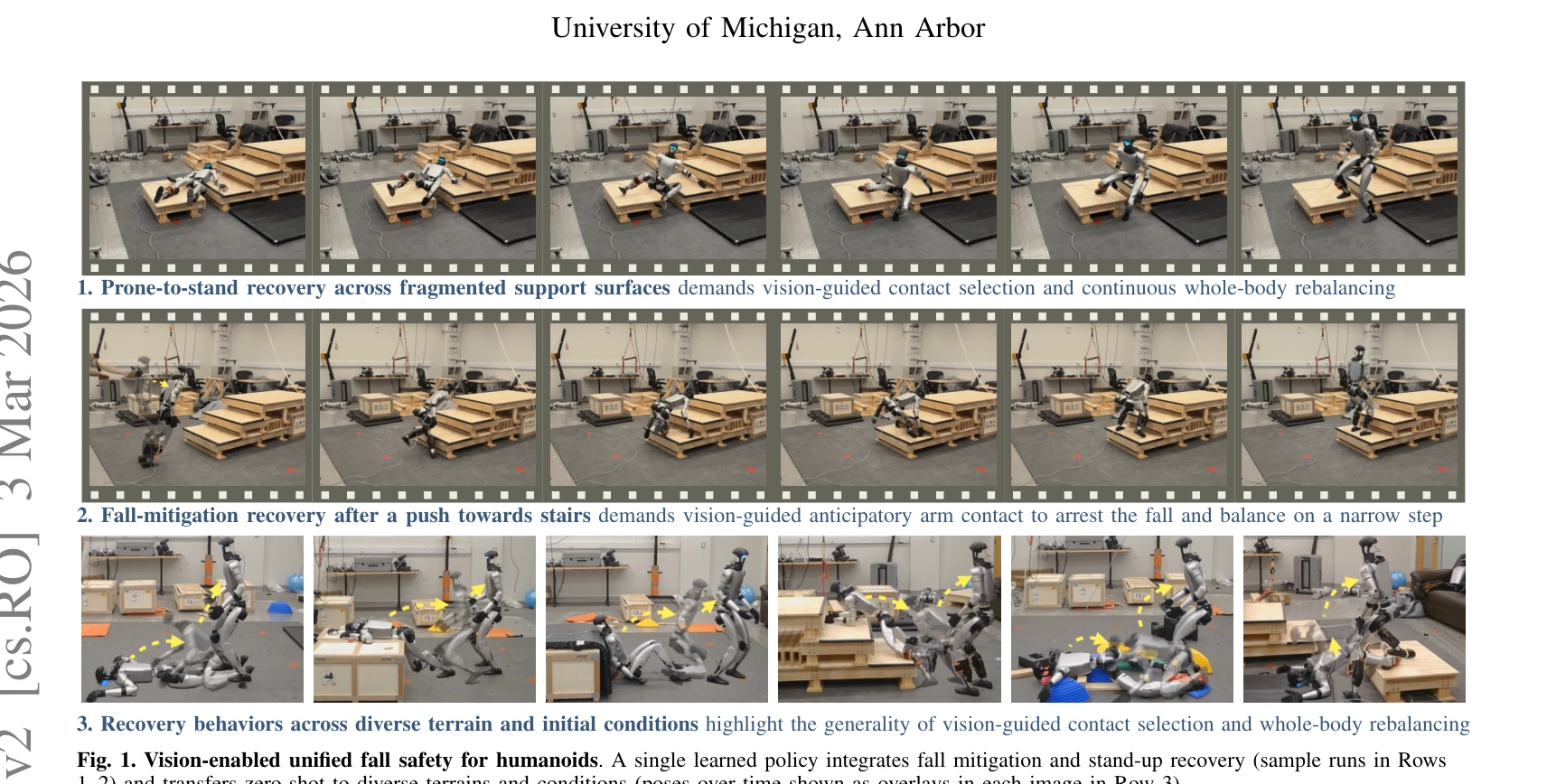
Fig. 1. Vision-enabled unified fall safety for humanoids. A single learned policy integrates fall mitigation and stand-u
휴머노이드 로봇의 넘어짐 안전성을 위해 teacher-student 증류 방식으로 egocentric depth와 proprioception만 사용하여 시각적 goal-in-context 표현을 학습하는 통합 접근법을 제시한다.